Other Parts Discussed in Thread: TIDM-02014
HI Team,
There's an issue from the customer need your help:
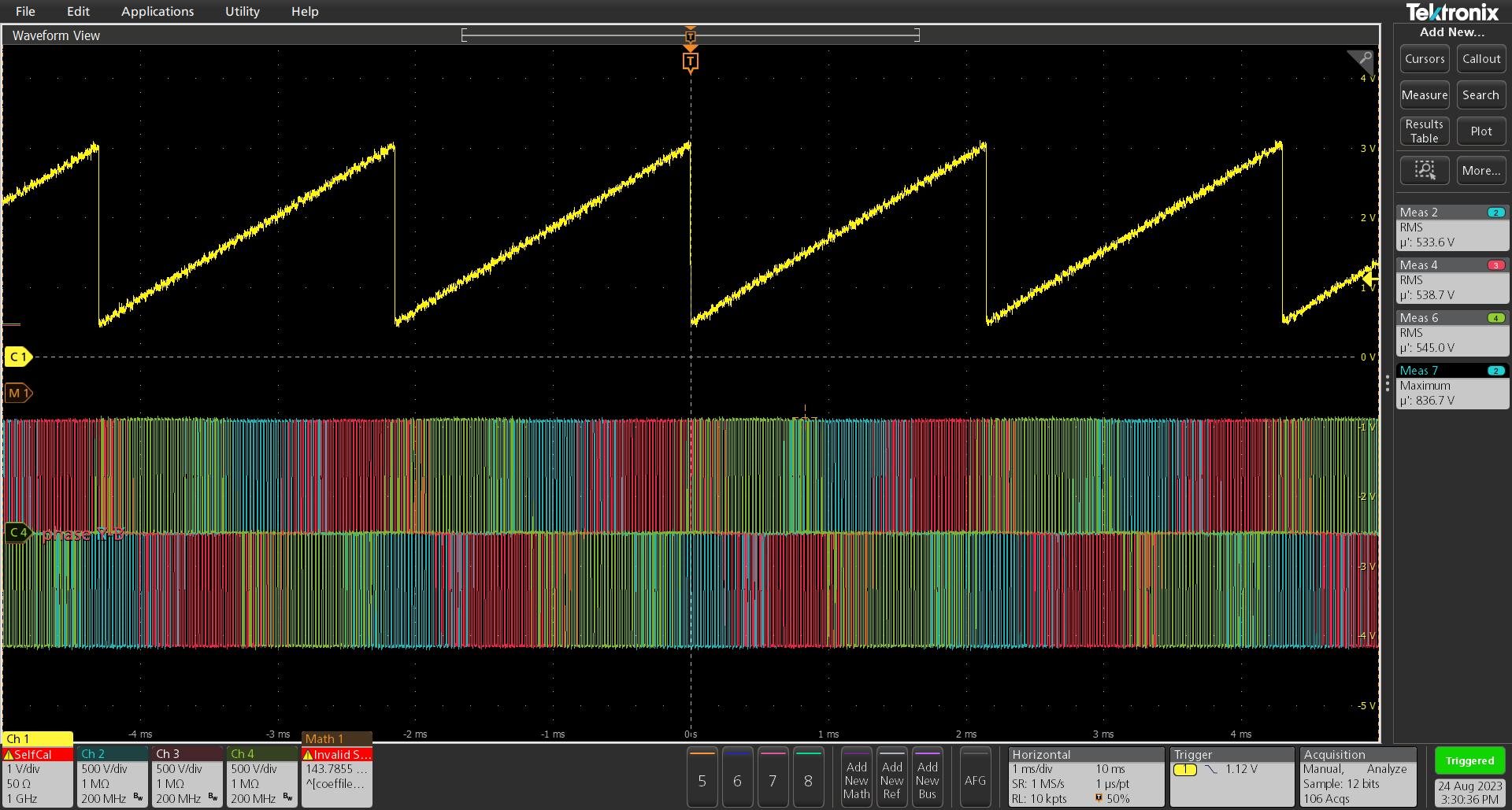
May I ask what method can be used to output the real-time angle of the motor rotor position in real time? In addition, I saw the angle variable in the code. Using the built-in graph function of ccs will cause the problem that the refresh rate is slow and the position signal cannot be displayed. How to output the real-time angle of the motor rotor position in real time?
Thanks & Regards,
Ben