Tool/software:
Hi 各位专家,
在学习TIDA-010062的过程中有些问题要请教下:
- PFC驱动部分的,EPWM1-A和EPWM1-B起的什么作用?我看在程序里没有设置它的占空比?
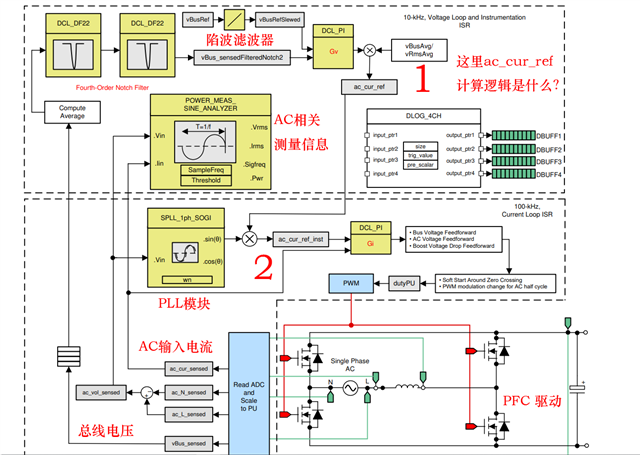
- 在Lab4中关于如下代码几个变量的理解,TTPLPFC_ac_cur_ref_pu和TTPLPFC_ac_cur_ref_inst_pu,这两个变量的计算逻辑是怎样的?
//总线电压环Gv的输出,参考LAB4右上方的框图部分,TTPLPFC_gv_out是电压环PI(串行PI控制器)的结果,不过不明白为什么要这样计算
TTPLPFC_ac_cur_ref_pu = TTPLPFC_gv_out *
TTPLPFC_vBusAvg_pu / (TTPLPFC_vACRmsMeasAvg_pu);
- 能将PFC驱动得到占空比的大致原理说一下吗?
公司要开始做数字电源开发(基于TI的实时处理器),我想预先了解相关知识,TIDA-010062的源程序我已大部分都学习过了。有些疑问通过TI技术支持,但很少得到回复,不知是什么原因。