Tool/software:
Hi Champ,
I am asking for my customer.
They are evaluating TIDA-010054, and have few questions about the source code.
(1). Entering ISR, there are having counters (isr1Ticker++ / isr2Ticker++) added up in ISR1 and *in ISR2, any specific use for the counters ? any purpose for the two counters ?
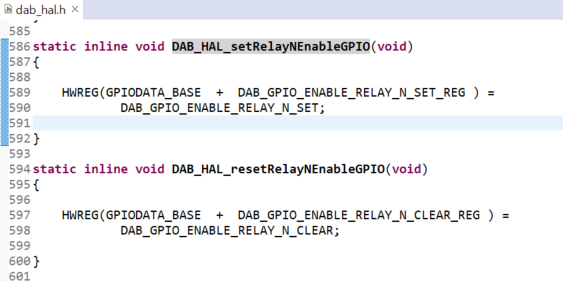
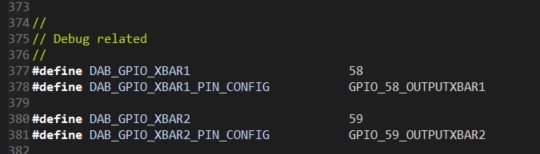
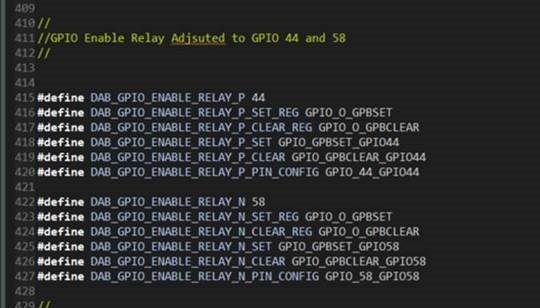
(2). There is GPIO redefined. Debugging and Relay control are in conflict with GPIO58 but it's not used, is there any consideration that remains / keeps in the source code ? any use / design concern for that ?
(3). What are the A0-A3, B0-B3, C0-C3 tasks switching modes and uses in main.c file ?
(4). The command slow start mode in ISR2, is there a flowchart to illustrate ? Contains the feedback using IDFM for moving average and mapping process.
Thanks and regards,
Johnny