Part Number: PMP23069
Tool/software:
Hi Team,
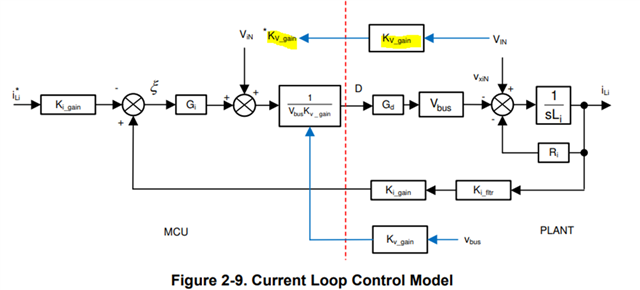
For the “runCurrentLoop()” function, after the PI the gi_out term is added to the instantaneous AC voltage divided by the bus voltage. Is there a reason why this was chosen as opposed to a more traditional average current mode control loop? Just trying to understand the pros and cons