Other Parts Discussed in Thread: ENERGIA, PGA460
Hi Team,
I have bought TIDA-060024 module for my project, i have bought the sensor module only not whole development board.
I am sending commands to sensor using arduino board, i made all the configurations for 40kHz frequency sensor module as per your Energia library(taken Murata MA40H1SR EEPROM settings).
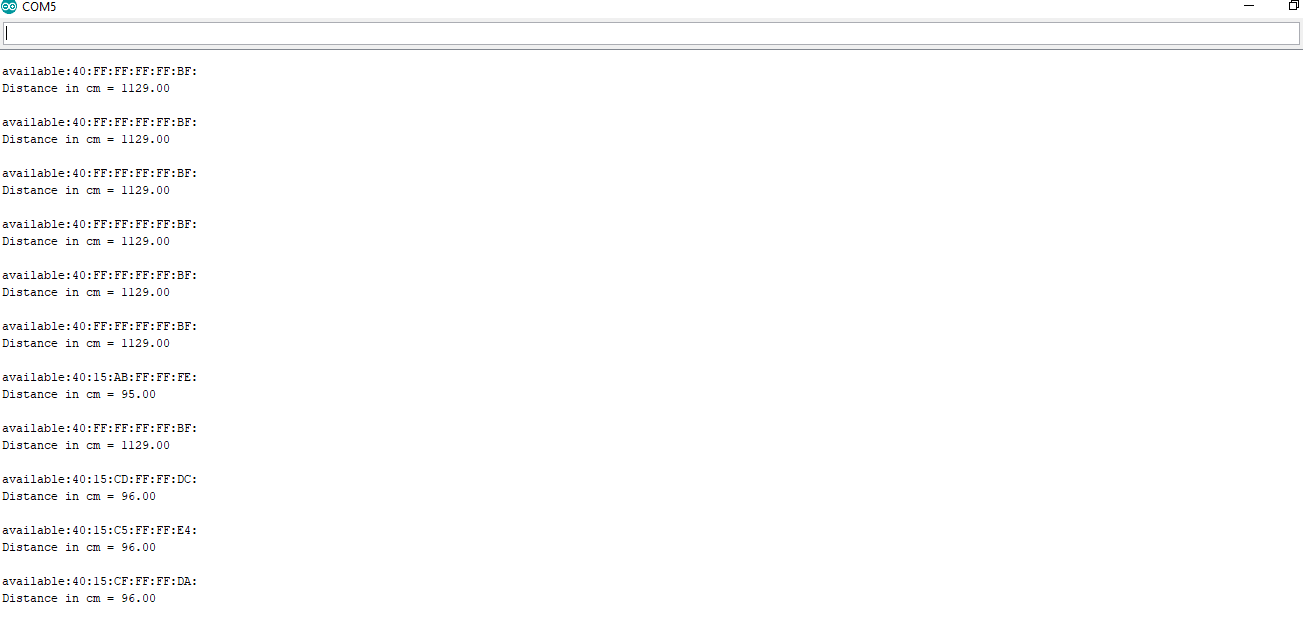
But for burst and listen(preset 1), i am not receiving proper distance values.
Please let me know if any major configurations i am missing.
I configured EEPROM(based on murata MA40H1SR), TVG gain considered (52-84db), thresholds are taken for 50%.
Other that Ultrasonic measurement result, all other commands and register reads giving proper values.
Thanks and Regards,
Chetan Hiremath