Other Parts Discussed in Thread: CC2340R5
Hi TI team
Now we are using LIN interface instead of UART interace in CC2340R5-Q1 for Smart Car Application. And now we have got RSSI from Our CC2340R5-Q1 device by LIN interface.
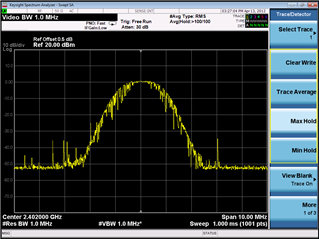
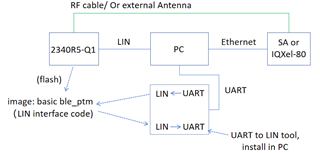
One thing we are doing is that how to use LIN interface to test RF performence. We have know that PTM mode can support basic ble image and also HCI cmd, and we have been sure that it can support our RF test by UART interface. Now we have changed the UART interface to LIN interface, and also, we can get the right hci cmd response form LIN interface. But the signal is so many bursts and each burst is spacing 3-8 seconds when we capture signal by Siganl Analyzer. The burst interval is so long, therefore, it caused IQXel-80(Bluetooth RF test equipment) could not capture the signal and the test is fail. Could you please help us review our code or remind us how can get continue signal by LIN interface?
Thank you so much!
basic_ble_LP_EM_CC2340R5_freertos_ticlang_0520-0315.zip
Best Regards,
Annie