Other Parts Discussed in Thread: SYSCONFIG,
Tool/software:
Hi teams,
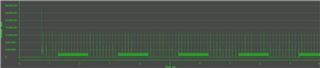
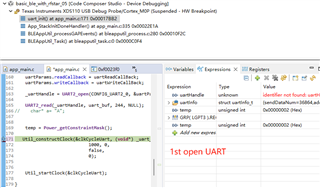
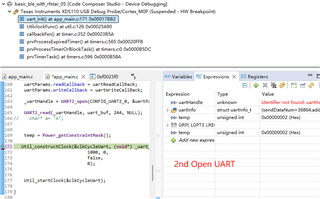
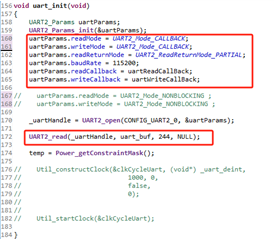
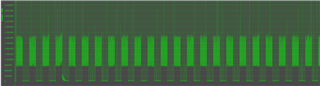
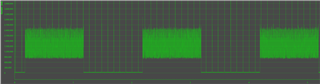
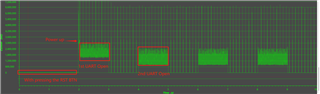
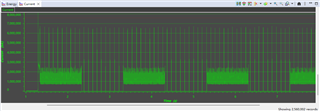
In basic_ble demo, I start a open-and-reopen(period of 1s) UART driver loop at the App_StackInitDoneHandler. Then I use ET to trace the current and find that the current consumption at the first round openning UART driver is a slightly higher the subsequent rounds, as shown below.
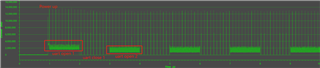
Why does this happen? Please help with this.
Thanks.
BR
Connor