Other Parts Discussed in Thread: CC2340R5, SYSCONFIG, , LP-EM-CC2340R5
Tool/software:
Dear TI Support Team,
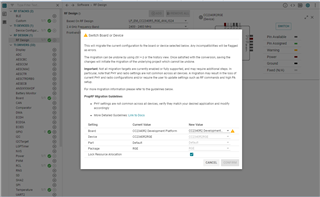
I am writing to seek assistance regarding an issue I encountered while working with the CC2340R2 chip. I followed the guidelines to modify the flash macro definitions, switched the chip model in SysConfig, cleared previous build information, and reprogrammed the device. The code that was functioning perfectly on the CC2340R5, continuously transmitting Bluetooth iBeacon data, fails to transmit any data on the CC2340R2.
For the hardware modifications, we replaced the chip on the LP-EM-CC2340R5 demo board with the CC2340R2. I conducted tests using SmartRF Studio 8, and the results showed successful data transmission on channels 37, 38, and 39, confirming that the hardware setup is operational.
Could you provide any solutions or guidance on configuring the project to address this issue on the software side? Your assistance would be greatly appreciated.
Thank you for your support.
Best regards