Other Parts Discussed in Thread: CC2745R10-Q1
Tool/software:
Hi,
I am designing a BLE Application with TI CC2745R10-Q1 chipset.
Below are my queries :
1. I want to call TI APIs from different tasks other than the BLEApp_util task. Is it possible to call
Example: BLEAppUtil_advStart() API I want to call from the UART task
2. If it's not possible to call TI APIs from different tasks then I need to enqueue to the same queue where the TI callbacks are getting enquired
API : BLEAppUtil_enqueueMsg();--> BLEAppUtil_theardEntity.queueHandle.
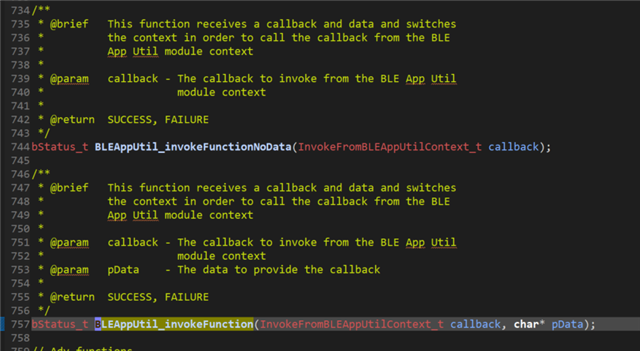
To call BLEAppUtil from different tasks BLEAppUtil_invokeFunction() API is used which interns add to the same queue with different EVT -BLEAPPUTIL_EVT_CALL_IN_BLEAPPUTIL_CONTEXT.
If I do this design I will end up in race condition where when we have multiple data to send to TI and at the same time if we receive a call back from TI.
Suggest to me how to handle this condition.
PFA for the issue that I mentioned above.