
- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Tool/software:
Hello,
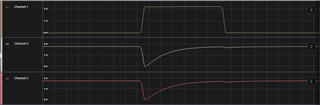
I am using the GPT timer to capture a pulse width. Two timers are being involved I set up both GPTTImers to capture both edges of the pulse and then I calculated the delta of the first edge and second edge. I have a TX line that will be enabled after both timers are set up. The Tx line is going to two identical capacitors, with the ends of each capacitor going to different rx gpios. Since the signal of the RX is the same, the generated interrupts should happen simultaneously, but it seems like only one interrupt is actually being generated, not both.
Thanks,
Kenneth T.






