


Part Number: CC2652R7
Tool/software:
Hey,
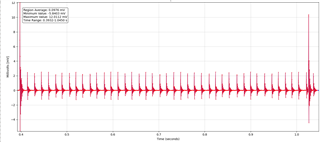
So my team members and I have been trying to determine the lowest power consumption of the TI-CC2652R7. We started off with the project_zero example and instead of launching the project_zero thread, we launched a test thread and stopped at the semaphore. When we do our power measurements, we get an average of 9 uA. However, according to the data sheet, we should be getting 0.9 uA in Standby. I understand that there might be something wrong with our circuitry, but if you can confirm that my approach to entering the standby state is correct, that would be greatly appreciated.
int main()
{
// Register Application callback to trap asserts raised in the Stack
RegisterAssertCback(AssertHandler);
Board_initGeneral();
#if !defined(POWER_SAVING)
// Set constraints for Standby, powerdown and idle mode
// PowerCC26XX_SB_DISALLOW may be redundant
Power_setConstraint(PowerCC26XX_SB_DISALLOW);
Power_setConstraint(PowerCC26XX_IDLE_PD_DISALLOW);
#endif // POWER_SAVING
// Update User Configuration of the stack
user0Cfg.appServiceInfo->timerTickPeriod = Clock_tickPeriod;
user0Cfg.appServiceInfo->timerMaxMillisecond = ICall_getMaxMSecs();
// Initialize ICall module
ICall_init();
#ifndef STACK_LIBRARY
{
// Find stack entry page
uint32_t stackAddr = findStackBoundaryAddr();
// If we cannot find the stack start address, exit
if (stackAddr == 0xFFFFFFFF)
ICall_abort();
// Set the stack image header based on the stack addr
stackImageHeader = (imgHdr_t*)stackAddr;
// Start tasks of external images - Priority 5
const ICall_RemoteTask_t remoteTaskTbl[] = { (ICall_RemoteTaskEntry)(stackImageHeader->prgEntry), 5, 1000, &user0Cfg };
// Start tasks of external images - Priority 5
ICall_createRemoteTasksAtRuntime((ICall_RemoteTask_t*)remoteTaskTbl, (sizeof(remoteTaskTbl) / sizeof(ICall_RemoteTask_t)));
}
#else
// Start tasks of external images - Priority 5
ICall_createRemoteTasks();
#endif
// Ensure low-frequency (real-time) clock initialized with external oscillator, otherwise downstream BLE and RTOS calls won't work
if (OSCClockSourceGet(OSC_SRC_CLK_LF) != OSC_XOSC_LF)
{
OSCClockSourceSet(OSC_SRC_CLK_LF, OSC_XOSC_LF);
}
#ifdef TEST_XOSC_LF
IOCPortConfigureSet(IOID_26, IOC_PORT_AON_CLK32K, IOC_STD_OUTPUT); // Pass-through external 32.768kHz oscillator clock signal (XOSC LF) out to TP1
AONIOC32kHzOutputEnable();
#endif
test();
// Enable interrupts and start SYS/BIOS
BIOS_start();
return 0;
}
static array<uint8_t, 3092> test_stack;
void test()
{
// Wrapper for creating a thread
Thread(TestThread, nullptr, make_shared<Thread::Settings>(test_stack.data(), test_stack.size()));
}
void* TestThread(void* arguments)
{
// Wrapper for creating a semaphore
Semaphore sem;
sem.wait();
return nullptr;
}
Best Regards,
Kenneth T.

