1. Use SDK simplelink_lowpower_f3_sdk_9_11_01_19
2. In the keynode demo, set it to connect to the carnode as the central node, pair and encrypt, then start CS_SecurityEnable.
3. Using the car node demo, set the car node's role to Reflector and the keynode to Initor.
4. After the carnode receives the CS_SECURITY_ENABLE_COMPLETE_EVENT event, it will use CS_ReadRemoteSupportedCapabilities.
5. After receiving the CS_READ_REMOTE_SUPPORTED_CAPABILITIES_COMPLETE_EVENT event, the carnode sets CS_SetDefaultSettings and CS_CreateConfig.
6. After the carnode receives the CS_CONFIG_COMPLETE_EVENT event, it sets CS_SetProcedureParameters and CS_ProcedureEnable.
7. At this point, CS ranging can run. After ranging ends, I want to use the original parameters to directly call CS_ProcedureEnable to start the next ranging operation. CS_ProcedureEnable returns a success status.
However, the CS_PROCEDURE_ENABLE_COMPLETE_EVENT event returns procEnableCompleteEvt.csStatus, which does not indicate success. procEnableCompleteEvt.csStatus = 0x32(RCL_CMD_BLE_CS_SUBEVENT_RESULTS_CONTINUE_OPCODE).
(If I execute the two operations CS_SetProcedureParameters + CS_ProcedureEnable every time after executing CS once, then CS will start successfully.)
Questions:
1. Why does CS fail to start even after the previous round of CS ranging has finished, and I successfully call CS_ProcedureEnable, but the CS_PROCEDURE_ENABLE_COMPLETE_EVENT event returns procEnableCompleteEvt.csStatus = 0X32?
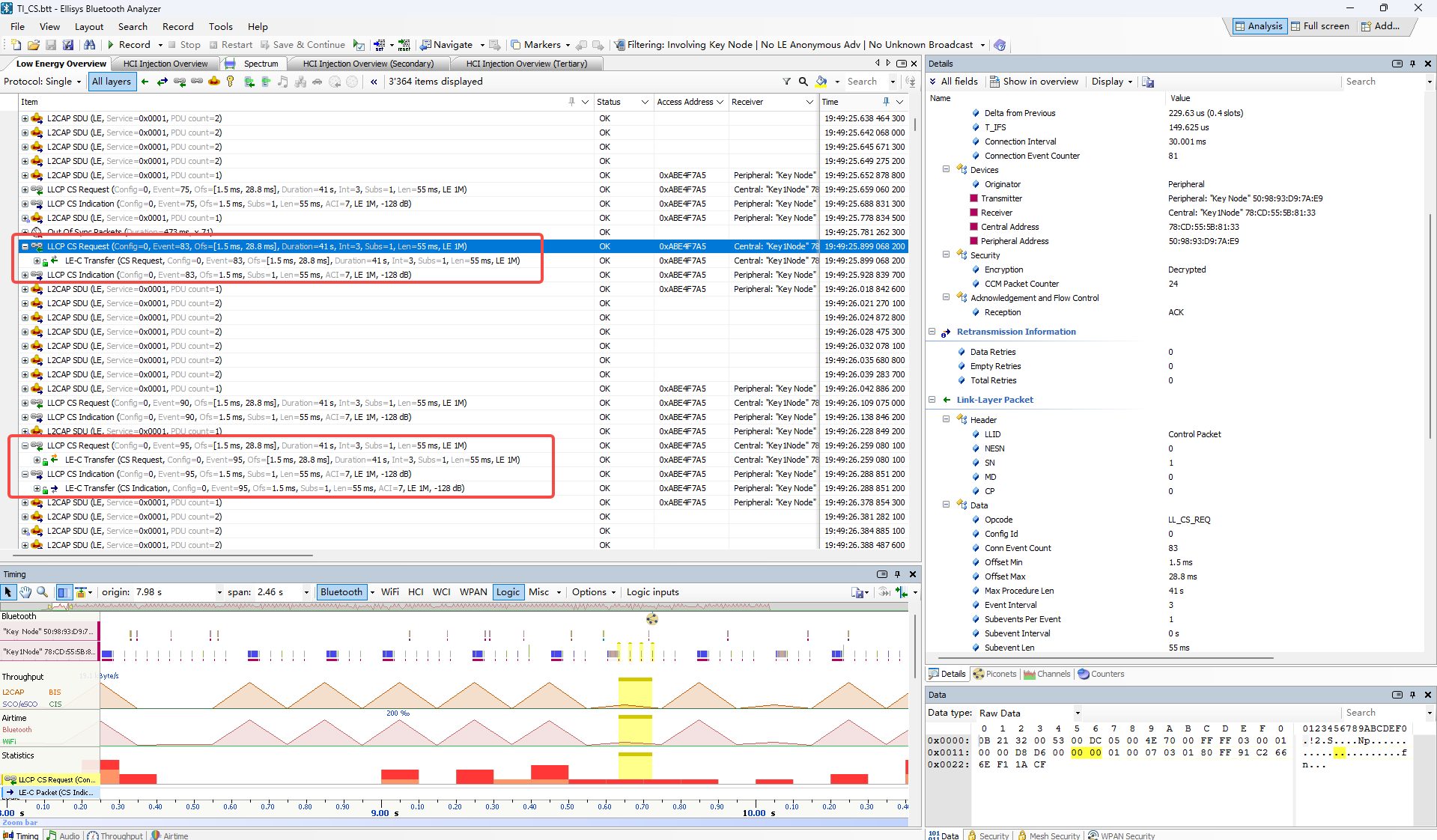
2. When I capture the sniffer log, the carnode, acting as the Reflector, requests to start CS and sends an LL_CS_Request. The keynode, acting as the Initor, does not return an LLCP_CS_Response packet to the Reflector. I believe this is a problem.