


Hi Motor Applications Team
Because it may be a hardware problem, it bought as a new product..
I try to control a DC motor using cc2650STK and drv8830EVM.
What drv8830EVM is classified as an external sensor?
According to the datasheet opt, tmp, such as sensors that are specified interface ID, device ID.
A sensor for use in accordance with 0, 1 value in the interface ID is different.
drv8830EVM do it is to use the interface of either 0 or 1?
processors.wiki.ti.com/.../CC2650_SensorTag_User's_Guide
In accessing I2C devices from the link above, it is referred to the internal device address.
Drv8830EVM driver is also internal sensor?
Unless it's, device ID do I need for an external sensor is handled in sensortag?
I would like to operate the motor in the I2C communication.
Attach a position to run the driver source.
Blow is sensorTag.c
/*******************************************************************************
Filename: SensorTag.c
Revised: $Date: 2013-11-20 20:28:12 +0100 (on, 20 nov 2013) $
Revision: $Revision: 36163 $
Description: This file is the SensorTag application's main body.
Copyright 2015 Texas Instruments Incorporated. All rights reserved.
IMPORTANT: Your use of this Software is limited to those specific rights
granted under the terms of a software license agreement between the user
who downloaded the software, his/her employer (which must be your employer)
and Texas Instruments Incorporated (the "License"). You may not use this
Software unless you agree to abide by the terms of the License. The License
limits your use, and you acknowledge, that the Software may not be modified,
copied or distributed unless embedded on a Texas Instruments microcontroller
or used solely and exclusively in conjunction with a Texas Instruments radio
frequency transceiver, which is integrated into your product. Other than for
the foregoing purpose, you may not use, reproduce, copy, prepare derivative
works of, modify, distribute, perform, display or sell this Software and/or
its documentation for any purpose.
YOU FURTHER ACKNOWLEDGE AND AGREE THAT THE SOFTWARE AND DOCUMENTATION ARE
PROVIDED ``AS IS" WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESS OR IMPLIED,
INCLUDING WITHOUT LIMITATION, ANY WARRANTY OF MERCHANTABILITY, TITLE,
NON-INFRINGEMENT AND FITNESS FOR A PARTICULAR PURPOSE. IN NO EVENT SHALL
TEXAS INSTRUMENTS OR ITS LICENSORS BE LIABLE OR OBLIGATED UNDER CONTRACT,
NEGLIGENCE, STRICT LIABILITY, CONTRIBUTION, BREACH OF WARRANTY, OR OTHER
LEGAL EQUITABLE THEORY ANY DIRECT OR INDIRECT DAMAGES OR EXPENSES
INCLUDING BUT NOT LIMITED TO ANY INCIDENTAL, SPECIAL, INDIRECT, PUNITIVE
OR CONSEQUENTIAL DAMAGES, LOST PROFITS OR LOST DATA, COST OF PROCUREMENT
OF SUBSTITUTE GOODS, TECHNOLOGY, SERVICES, OR ANY CLAIMS BY THIRD PARTIES
(INCLUDING BUT NOT LIMITED TO ANY DEFENSE THEREOF), OR OTHER SIMILAR COSTS.
Should you have any questions regarding your right to use this Software,
contact Texas Instruments Incorporated at www.TI.com.
*/
/*******************************************************************************
* INCLUDES
*/
#include <string.h>
#include <xdc/std.h>
#include <xdc/runtime/System.h>
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Clock.h>
#include <ti/sysbios/knl/Semaphore.h>
#include <ti/sysbios/knl/Queue.h>
#ifdef POWER_SAVING
#include <ti/sysbios/family/arm/cc26xx/Power.h>
#include <ti/sysbios/family/arm/cc26xx/PowerCC2650.h>
#endif
#include <ICall.h>
#include "gatt.h"
#include "hci.h"
#include "gapgattserver.h"
#include "gattservapp.h"
#include "gapbondmgr.h"
#include "osal_snv.h"
#include "ICallBleAPIMSG.h"
#include "util.h"
#include "bsp_i2c.h"
#include "bsp_spi.h"
#include "SensorTag_Revision.h"
#include "sensor.h"
#include "Board.h"
#include "devinfoservice.h"
#include "movementservice.h"
#ifdef FEATURE_LCD
#include "displayservice.h"
#endif
#ifdef FEATURE_REGISTER_SERVICE
#include "registerservice.h"
#endif
// Sensor devices
#include "st_util.h"
#include "SensorTag_Tmp.h"
#include "SensorTag_Hum.h"
#include "SensorTag_Bar.h"
#include "SensorTag_Mov.h"
#include "SensorTag_Opt.h"
#include "SensorTag_Keys.h"
#include "SensorTag_IO.h"
// Other devices
#include "ext_flash.h"
#include "ext_flash_layout.h"
#ifdef FEATURE_LCD
#include "SensorTag_Display.h"
#endif
// Optional services
#ifdef FEATURE_OAD
#include "sensortag_connctrl.h"
#include "oad_target.h"
#include "oad.h"
#endif
/*******************************************************************************
* CONSTANTS
*/
// How often to perform periodic event (in msec)
#define ST_PERIODIC_EVT_PERIOD 1000
// What is the advertising interval when device is discoverable
// (units of 625us, 160=100ms)
#define DEFAULT_ADVERTISING_INTERVAL 160
// General discoverable mode advertises indefinitely
#define DEFAULT_DISCOVERABLE_MODE GAP_ADTYPE_FLAGS_LIMITED
// Minimum connection interval (units of 1.25ms, 80=100ms) if automatic
// parameter update request is enabled
#define DEFAULT_DESIRED_MIN_CONN_INTERVAL 8
// Maximum connection interval (units of 1.25ms, 800=1000ms) if automatic
// parameter update request is enabled
#define DEFAULT_DESIRED_MAX_CONN_INTERVAL 800
// Slave latency to use if automatic parameter update request is enabled
#define DEFAULT_DESIRED_SLAVE_LATENCY 0
// Supervision timeout value (units of 10ms, 1000=10s) if automatic parameter
// update request is enabled
#define DEFAULT_DESIRED_CONN_TIMEOUT 100
// Whether to enable automatic parameter update request when a
// connection is formed
#define DEFAULT_ENABLE_UPDATE_REQUEST FALSE
// Connection Pause Peripheral time value (in seconds)
#define DEFAULT_CONN_PAUSE_PERIPHERAL 1
// Company Identifier: Texas Instruments Inc. (13)
#define TI_COMPANY_ID 0x000D
#define TI_ST_DEVICE_ID 0x03
#define TI_ST_KEY_DATA_ID 0x00
// Length of board address
#define B_ADDR_STR_LEN 15
#if defined ( PLUS_BROADCASTER )
#define ADV_IN_CONN_WAIT 500 // delay 500 ms
#endif
// Task configuration
#define ST_TASK_PRIORITY 1
#define ST_TASK_STACK_SIZE 700
// Internal Events for RTOS application
#define ST_STATE_CHANGE_EVT 0x0001
#define ST_CHAR_CHANGE_EVT 0x0002
#define ST_PERIODIC_EVT 0x0004
#ifdef FEATURE_OAD
#define SBP_OAD_WRITE_EVT 0x0008
#endif //FEATURE_OAD
// Misc.
#define INVALID_CONNHANDLE 0xFFFF
#define TEST_INDICATION_BLINKS 5 // Number of blinks
#define BLINK_DURATION 20 // Milliseconds
#define OAD_PACKET_SIZE 18
#define KEY_STATE_OFFSET 13 // Offset in advertising data
/*******************************************************************************
* TYPEDEFS
*/
// App event passed from profiles.
typedef struct
{
uint8_t event; // Which profile's event
uint8_t serviceID; // New status
uint8_t paramID;
} stEvt_t;
/*******************************************************************************
* GLOBAL VARIABLES
*/
// Profile state and parameters
gaprole_States_t gapProfileState = GAPROLE_INIT;
// Semaphore globally used to post events to the application thread
ICall_Semaphore sem;
// Global pin resources
PIN_State pinGpioState;
PIN_Handle hGpioPin;
/*******************************************************************************
* LOCAL VARIABLES
*/
// Task configuration
static Task_Struct sensorTagTask;
static Char sensorTagTaskStack[ST_TASK_STACK_SIZE];
// Entity ID globally used to check for source and/or destination of messages
static ICall_EntityID selfEntity;
// Clock instances for internal periodic events.
static Clock_Struct periodicClock;
// Queue object used for app messages
static Queue_Struct appMsg;
static Queue_Handle appMsgQueue;
// events flag for internal application events.
static uint16_t events;
// GAP - SCAN RSP data (max size = 31 bytes)
static uint8_t scanRspData[] =
{
// complete name
0x11, // length of this data
GAP_ADTYPE_LOCAL_NAME_COMPLETE,
'C', 'C', '2', '6', '5', '0', ' ',
'S', 'e', 'n', 's', 'o', 'r', 'T', 'a', 'g',
// connection interval range
0x05, // length of this data
GAP_ADTYPE_SLAVE_CONN_INTERVAL_RANGE,
LO_UINT16( DEFAULT_DESIRED_MIN_CONN_INTERVAL ),
HI_UINT16( DEFAULT_DESIRED_MIN_CONN_INTERVAL ),
LO_UINT16( DEFAULT_DESIRED_MAX_CONN_INTERVAL ),
HI_UINT16( DEFAULT_DESIRED_MAX_CONN_INTERVAL ),
// Tx power level
0x02, // length of this data
GAP_ADTYPE_POWER_LEVEL,
0 // 0dBm
};
// GAP - Advertisement data (max size = 31 bytes, though this is
// best kept short to conserve power while advertising)
static uint8_t advertData[] =
{
// Flags; this sets the device to use limited discoverable
// mode (advertises for 30 seconds at a time) instead of general
// discoverable mode (advertises indefinitely)
0x02, // length of this data
GAP_ADTYPE_FLAGS,
DEFAULT_DISCOVERABLE_MODE | GAP_ADTYPE_FLAGS_BREDR_NOT_SUPPORTED,
// service UUID, to notify central devices what services are included
// in this peripheral
0x03, // length of this data
GAP_ADTYPE_16BIT_MORE, // some of the UUID's, but not all
#ifdef FEATURE_LCD
LO_UINT16(DISPLAY_SERV_UUID),
HI_UINT16(DISPLAY_SERV_UUID),
#else
LO_UINT16(MOVEMENT_SERV_UUID),
HI_UINT16(MOVEMENT_SERV_UUID),
#endif
// Manufacturer specific advertising data
0x06,
GAP_ADTYPE_MANUFACTURER_SPECIFIC,
LO_UINT16(TI_COMPANY_ID),
HI_UINT16(TI_COMPANY_ID),
TI_ST_DEVICE_ID,
TI_ST_KEY_DATA_ID,
0x00 // Key state
};
// GAP GATT Attributes
//static const uint8_t attDeviceName[GAP_DEVICE_NAME_LEN] = "SensorTag 2.0";
static const uint8_t attDeviceName[GAP_DEVICE_NAME_LEN] = "BELA";
#if FEATURE_OAD
// Event data from OAD profile.
static Queue_Struct oadQ;
static Queue_Handle hOadQ;
#endif //FEATURE_OAD
// Device information parameters
static const uint8_t devInfoModelNumber[] = "CC2650 SensorTag";
static const uint8_t devInfoNA[] = "N.A.";
static const uint8_t devInfoFirmwareRev[] = FW_VERSION_STR;
static const uint8_t devInfoMfrName[] = "Texas Instruments";
static const uint8_t devInfoHardwareRev[] = "PCB 1.2/1.3";
// Pins that are actively used by the application
static PIN_Config SensortagAppPinTable[] =
{
Board_LED1 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* LED initially off */
Board_LED2 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* LED initially off */
Board_KEY_LEFT | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_BOTHEDGES | PIN_HYSTERESIS, /* Button is active low */
Board_KEY_RIGHT | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_BOTHEDGES | PIN_HYSTERESIS, /* Button is active low */
Board_RELAY | PIN_INPUT_EN | PIN_PULLDOWN | PIN_IRQ_BOTHEDGES | PIN_HYSTERESIS, /* Relay is active high */
Board_BUZZER | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* Buzzer initially off */
PIN_TERMINATE
};
/*******************************************************************************
* LOCAL FUNCTIONS
*/
static void SensorTag_init( void);
static void SensorTag_taskFxn( UArg a0, UArg a1);
static void SensorTag_processStackMsg( ICall_Hdr *pMsg);
static void SensorTag_processGATTMsg(gattMsgEvent_t *pMsg);
static void SensorTag_processAppMsg( stEvt_t *pMsg);
static void SensorTag_processStateChangeEvt( gaprole_States_t newState ) ;
static void SensorTag_processCharValueChangeEvt( uint8_t serviceID, uint8_t paramID ) ;
static void SensorTag_performPeriodicTask( void);
static void SensorTag_stateChangeCB( gaprole_States_t newState);
static void SensorTag_resetAllSensors(void);
static void SensorTag_clockHandler(UArg arg);
static void SensorTag_enqueueMsg(uint8_t event, uint8_t serviceID, uint8_t paramID);
static void SensorTag_callback(PIN_Handle handle, PIN_Id pinId);
static bool SensorTag_hasFactoryImage(void);
static void SensorTag_setDeviceInfo(void);
//static void SensorTag_BuzzTest(gaprole_States_t n);
#ifdef FACTORY_IMAGE
static bool SensorTag_saveFactoryImage(void);
#endif
#ifdef FEATURE_OAD
static void SensorTag_processOadWriteCB(uint8_t event, uint16_t connHandle,
uint8_t *pData);
#endif //FEATURE_OAD
/*******************************************************************************
* PROFILE CALLBACKS
*/
// GAP Role Callbacks
static gapRolesCBs_t SensorTag_gapRoleCBs =
{
SensorTag_stateChangeCB // Profile State Change Callbacks
};
#ifdef FEATURE_OAD
static gapRolesParamUpdateCB_t paramUpdateCB =
{
SensorTagConnControl_paramUpdateCB
};
static oadTargetCBs_t simpleBLEPeripheral_oadCBs =
{
NULL, // Read Callback. Optional.
SensorTag_processOadWriteCB // Write Callback. Mandatory.
};
#endif //FEATURE_OAD
/*******************************************************************************
* PUBLIC FUNCTIONS
*/
/*******************************************************************************
* @fn SensorTag_createTask
*
* @brief Task creation function for the SensorTag.
*
* @param none
*
* @return none
*/
void SensorTag_createTask(void)
{
Task_Params taskParams;
// Configure task
Task_Params_init(&taskParams);
taskParams.stack = sensorTagTaskStack;
taskParams.stackSize = ST_TASK_STACK_SIZE;
taskParams.priority = ST_TASK_PRIORITY;
Task_construct(&sensorTagTask, SensorTag_taskFxn, &taskParams, NULL);
}
/*******************************************************************************
* @fn SensorTag_init
*
* @brief Called during initialization and contains application
* specific initialization (ie. hardware initialization/setup,
* table initialization, power up notification, etc), and
* profile initialization/setup.
*
* @param none
*
* @return none
*/
static void SensorTag_init(void)
{
uint8_t selfTestMap;
// float i =0;
// Setup I2C for sensors
bspI2cInit();
// Handling of buttons, LED, relay
hGpioPin = PIN_open(&pinGpioState, SensortagAppPinTable);
PIN_registerIntCb(hGpioPin, SensorTag_callback);
// ***************************************************************************
// N0 STACK API CALLS CAN OCCUR BEFORE THIS CALL TO ICall_registerApp
// ***************************************************************************
// Register the current thread as an ICall dispatcher application
// so that the application can send and receive messages.
ICall_registerApp(&selfEntity, &sem);
// Create an RTOS queue for message from profile to be sent to app.
appMsgQueue = Util_constructQueue(&appMsg);
// Create one-shot clocks for internal periodic events.
Util_constructClock(&periodicClock, SensorTag_clockHandler,
ST_PERIODIC_EVT_PERIOD, 0, false, ST_PERIODIC_EVT);
// Setup the GAP
GAP_SetParamValue(TGAP_CONN_PAUSE_PERIPHERAL, DEFAULT_CONN_PAUSE_PERIPHERAL);
// Setup the GAP Peripheral Role Profile
{
// For all hardware platforms, device starts advertising upon initialization
uint8_t initialAdvertEnable = TRUE;
// By setting this to zero, the device will go into the waiting state after
// being discoverable for 30.72 second, and will not being advertising again
// until the enabler is set back to TRUE
uint16_t advertOffTime = 0;
uint8_t enableUpdateRequest = DEFAULT_ENABLE_UPDATE_REQUEST;
uint16_t desiredMinInterval = DEFAULT_DESIRED_MIN_CONN_INTERVAL;
uint16_t desiredMaxInterval = DEFAULT_DESIRED_MAX_CONN_INTERVAL;
uint16_t desiredSlaveLatency = DEFAULT_DESIRED_SLAVE_LATENCY;
uint16_t desiredConnTimeout = DEFAULT_DESIRED_CONN_TIMEOUT;
// Set the GAP Role Parameters
GAPRole_SetParameter(GAPROLE_ADVERT_ENABLED, sizeof(uint8_t),
&initialAdvertEnable);
GAPRole_SetParameter(GAPROLE_ADVERT_OFF_TIME, sizeof(uint16_t),
&advertOffTime);
GAPRole_SetParameter(GAPROLE_SCAN_RSP_DATA, sizeof(scanRspData),
scanRspData);
GAPRole_SetParameter(GAPROLE_ADVERT_DATA, sizeof(advertData), advertData);
GAPRole_SetParameter(GAPROLE_PARAM_UPDATE_ENABLE, sizeof(uint8_t),
&enableUpdateRequest);
GAPRole_SetParameter(GAPROLE_MIN_CONN_INTERVAL, sizeof(uint16_t),
&desiredMinInterval);
GAPRole_SetParameter(GAPROLE_MAX_CONN_INTERVAL, sizeof(uint16_t),
&desiredMaxInterval);
GAPRole_SetParameter(GAPROLE_SLAVE_LATENCY, sizeof(uint16_t),
&desiredSlaveLatency);
GAPRole_SetParameter(GAPROLE_TIMEOUT_MULTIPLIER, sizeof(uint16_t),
&desiredConnTimeout);
}
// Set the GAP Characteristics
GGS_SetParameter(GGS_DEVICE_NAME_ATT, GAP_DEVICE_NAME_LEN,
(void*)attDeviceName);
#ifdef FEATURE_OAD
// Register connection parameter update
GAPRole_RegisterAppCBs( ¶mUpdateCB);
#endif
// Set advertising interval
{
uint16_t advInt = DEFAULT_ADVERTISING_INTERVAL;
GAP_SetParamValue(TGAP_LIM_DISC_ADV_INT_MIN, advInt);
GAP_SetParamValue(TGAP_LIM_DISC_ADV_INT_MAX, advInt);
GAP_SetParamValue(TGAP_GEN_DISC_ADV_INT_MIN, advInt);
GAP_SetParamValue(TGAP_GEN_DISC_ADV_INT_MAX, advInt);
}
// Initialize GATT attributes
GGS_AddService(GATT_ALL_SERVICES); // GAP
GATTServApp_AddService(GATT_ALL_SERVICES); // GATT attributes
DevInfo_AddService(); // Device Information Service
// Add application specific device information
SensorTag_setDeviceInfo();
// Power on self-test for sensors, flash and DevPack
selfTestMap = sensorTestExecute(ST_TEST_MAP);
if (selfTestMap == ST_TEST_MAP)
{
SensorTag_blinkLed(Board_LED2,TEST_INDICATION_BLINKS);
}
else
{
SensorTag_blinkLed(Board_LED1,TEST_INDICATION_BLINKS);
}
#ifdef FACTORY_IMAGE
// Check if a factory image exists and apply current image if necessary
if (!SensorTag_hasFactoryImage())
{
SensorTag_saveFactoryImage();
}
#endif
// Initialize sensors who don't have their own tasks
SensorTagMov_init(); // Movement processor
SensorTagOpt_init(); // Light meter
// Auxiliary services
SensorTagKeys_init(); // Simple Keys
SensorTagIO_init(); // IO (LED++self test)
sensorDrv8830Reset();
// sensorDrv8830ext();
//sensorDrv8830Start();
sensorDrv8830Init();
// for(i =5.0; i<=63.0; i+=5.0){
//sensorDrv8830Speed(5.0);
//delay_ms(00);
// }
//sensorDrv8830Voltage(5.00);
#ifdef FEATURE_REGISTER_SERVICE
Register_addService(); // Generic register access
#endif
#ifdef FEATURE_LCD
SensorTagDisplay_init(); // Display service DevPack LCD
#endif
#ifdef FEATURE_OAD
SensorTagConnectionControl_init(); // Connection control to
// support OAD for iOs/Android
OAD_addService(); // OAD Profile
OAD_register((oadTargetCBs_t *)&simpleBLEPeripheral_oadCBs);
hOadQ = Util_constructQueue(&oadQ);
#endif
// Start the Device
GAPRole_StartDevice(&SensorTag_gapRoleCBs);
// Start Bond Manager
VOID GAPBondMgr_Register(NULL);
// Enable interrupt handling for keys and relay
PIN_registerIntCb(hGpioPin, SensorTag_callback);
}
/*******************************************************************************
* @fn SensorTag_taskFxn
*
* @brief Application task entry point for the SensorTag
*
* @param a0, a1 (not used)
*
* @return none
*/
static void SensorTag_taskFxn(UArg a0, UArg a1)
{
// Initialize application
SensorTag_init();
// Application main loop
for (;;)
{
// Waits for a signal to the semaphore associated with the calling thread.
// Note that the semaphore associated with a thread is signalled when a
// message is queued to the message receive queue of the thread or when
// ICall_signal() function is called onto the semaphore.
ICall_Errno errno = ICall_wait(ICALL_TIMEOUT_FOREVER);
if (errno == ICALL_ERRNO_SUCCESS)
{
ICall_EntityID dest;
ICall_ServiceEnum src;
ICall_HciExtEvt *pMsg = NULL;
if (ICall_fetchServiceMsg(&src, &dest,
(void **)&pMsg) == ICALL_ERRNO_SUCCESS)
{
if ((src == ICALL_SERVICE_CLASS_BLE) && (dest == selfEntity))
{
// Process inter-task message
SensorTag_processStackMsg((ICall_Hdr *)pMsg);
}
if (pMsg)
{
ICall_freeMsg(pMsg);
}
}
// If RTOS queue is not empty, process app message.
while (!Queue_empty(appMsgQueue))
{
stEvt_t *pMsg = (stEvt_t *)Util_dequeueMsg(appMsgQueue);
if (pMsg)
{
// Process message.
SensorTag_processAppMsg(pMsg);
// Free the space from the message.
ICall_free(pMsg);
}
}
// Process new data if available
SensorTagKeys_processEvent();
SensorTagOpt_processSensorEvent();
SensorTagMov_processSensorEvent();
}
if (!!(events & ST_PERIODIC_EVT))
{
events &= ~ST_PERIODIC_EVT;
if (gapProfileState == GAPROLE_CONNECTED
|| gapProfileState == GAPROLE_ADVERTISING)
{
Util_startClock(&periodicClock);
}
// Perform periodic application task
if (gapProfileState == GAPROLE_CONNECTED)
{
SensorTag_performPeriodicTask();
}
// Blink green LED when advertising
if (gapProfileState == GAPROLE_ADVERTISING)
{
SensorTag_blinkLed(Board_LED2,1); //advertising �Ҷ� �� ���� ��� ��ڱ��
#ifdef FEATURE_LCD
SensorTag_displayBatteryVoltage();
#endif
}
}
#ifdef FEATURE_OAD
while (!Queue_empty(hOadQ))
{
oadTargetWrite_t *oadWriteEvt = Queue_dequeue(hOadQ);
// Identify new image.
if (oadWriteEvt->event == OAD_WRITE_IDENTIFY_REQ)
{
OAD_imgIdentifyWrite(oadWriteEvt->connHandle,
oadWriteEvt->pData);
}
// Write a next block request.
else if (oadWriteEvt->event == OAD_WRITE_BLOCK_REQ)
{
OAD_imgBlockWrite(oadWriteEvt->connHandle,
oadWriteEvt->pData);
}
// Free buffer.
ICall_free(oadWriteEvt);
}
#endif //FEATURE_OAD
} // task loop
}
/*******************************************************************************
* @fn SensorTag_setDeviceInfo
*
* @brief Set application specific Device Information
*
* @param none
*
* @return none
*/
static void SensorTag_setDeviceInfo(void)
{
DevInfo_SetParameter(DEVINFO_MODEL_NUMBER, sizeof(devInfoModelNumber),
(void*)devInfoModelNumber);
DevInfo_SetParameter(DEVINFO_SERIAL_NUMBER, sizeof(devInfoNA),
(void*)devInfoNA);
DevInfo_SetParameter(DEVINFO_SOFTWARE_REV, sizeof(devInfoNA),
(void*)devInfoNA);
DevInfo_SetParameter(DEVINFO_FIRMWARE_REV, sizeof(devInfoFirmwareRev),
(void*)devInfoFirmwareRev);
DevInfo_SetParameter(DEVINFO_HARDWARE_REV, sizeof(devInfoHardwareRev),
(void*)devInfoHardwareRev);
DevInfo_SetParameter(DEVINFO_MANUFACTURER_NAME, sizeof(devInfoMfrName),
(void*)devInfoMfrName);
}
/*******************************************************************************
* @fn SensorTag_processAppMsg
*
* @brief Process an incoming callback from a profile.
*
* @param pMsg - message to process
*
* @return none
*/
static void SensorTag_processAppMsg(stEvt_t *pMsg)
{
switch (pMsg->event)
{
case ST_STATE_CHANGE_EVT:
SensorTag_processStateChangeEvt((gaprole_States_t)pMsg->serviceID);
break;
case ST_CHAR_CHANGE_EVT:
SensorTag_processCharValueChangeEvt(pMsg->serviceID, pMsg->paramID);
break;
default:
// Do nothing.
break;
}
}
/*******************************************************************************
* @fn SensorTag_stateChangeCB
*
* @brief Callback from GAP Role indicating a role state change.
*
* @param newState - new state
*
* @return none
*/
static void SensorTag_stateChangeCB(gaprole_States_t newState)
{
SensorTag_enqueueMsg(ST_STATE_CHANGE_EVT, newState, NULL);
}
/*******************************************************************************
* @fn SensorTag_processStateChangeEvt
*
* @brief Process a pending GAP Role state change event.
*
* @param newState - new state
*
* @return none
*/
static void SensorTag_processStateChangeEvt(gaprole_States_t newState)
{
#ifdef PLUS_BROADCASTER
static bool firstConnFlag = false;
#endif // PLUS_BROADCASTER
switch (newState)
{
case GAPROLE_STARTED:
{
uint8_t ownAddress[B_ADDR_LEN];
uint8_t systemId[DEVINFO_SYSTEM_ID_LEN];
SensorTag_blinkLed(Board_LED1, 5);
SensorTag_blinkLed(Board_LED2, 5);
SensorTag_blinkLed(Board_LED1, 5);
SensorTag_blinkLed(Board_LED2, 5);
SensorTag_blinkLed(Board_LED1, 5);
SensorTag_blinkLed(Board_LED2, 5);
GAPRole_GetParameter(GAPROLE_BD_ADDR, ownAddress);
// use 6 bytes of device address for 8 bytes of system ID value
systemId[0] = ownAddress[0];
systemId[1] = ownAddress[1];
systemId[2] = ownAddress[2];
// set middle bytes to zero
systemId[4] = 0x00;
systemId[3] = 0x00;
// shift three bytes up
systemId[7] = ownAddress[5];
systemId[6] = ownAddress[4];
systemId[5] = ownAddress[3];
DevInfo_SetParameter(DEVINFO_SYSTEM_ID, DEVINFO_SYSTEM_ID_LEN, systemId);
LCD_WRITES_STATUS("Initialized");
}
break;
case GAPROLE_ADVERTISING:
// Start the clock
if (!Util_isActive(&periodicClock))
{
Util_startClock(&periodicClock);
PIN_setOutputValue(hGpioPin, Board_BUZZER, Board_BUZZER_ON);
}
// Make sure key presses are not stuck
sensorTag_updateAdvertisingData(0);
LCD_WRITES_STATUS("Advertising");
break;
case GAPROLE_CONNECTED:
{
// Start the clock
if (!Util_isActive(&periodicClock))
{
Util_startClock(&periodicClock);
}
// Turn off LEDs and buzzer
PIN_setOutputValue(hGpioPin, Board_LED1, Board_LED_OFF);
PIN_setOutputValue(hGpioPin, Board_LED2, Board_LED_OFF);
PIN_setOutputValue(hGpioPin, Board_BUZZER, Board_BUZZER_OFF);
#ifdef FEATURE_OAD
SensorTagConnectionControl_update();
#endif
#ifdef PLUS_BROADCASTER
// Only turn advertising on for this state when we first connect
// otherwise, when we go from connected_advertising back to this state
// we will be turning advertising back on.
if (firstConnFlag == false)
{
uint8_t advertEnabled = TRUE; // Turn on Advertising
GAPRole_SetParameter(GAPROLE_ADVERT_ENABLED, sizeof(uint8_t),
&advertEnabled);
firstConnFlag = true;
}
#endif // PLUS_BROADCASTER
}
LCD_WRITES_STATUS("Connected!!!");
break;
case GAPROLE_CONNECTED_ADV:
break;
case GAPROLE_WAITING:
case GAPROLE_WAITING_AFTER_TIMEOUT:
SensorTag_resetAllSensors(); //���� �� ����
LCD_WRITES_STATUS("Waiting...");
break;
case GAPROLE_ERROR:
SensorTag_resetAllSensors();
PIN_setOutputValue(hGpioPin,Board_LED1, Board_LED_ON);
LCD_WRITES_STATUS("Error");
break;
default:
break;
}
gapProfileState = newState;
}
/*static void SensorTag_BuzzTest(gaprole_States_t n){
switch(gapProfileState)
{
case GAPROLE_ADVERTISING:
SensorTag_blinkLed(Board_LED1, 5);
SensorTag_blinkLed(Board_LED2, 5);
SensorTag_blinkLed(Board_LED1, 5);
SensorTag_blinkLed(Board_LED2, 5);
SensorTag_blinkLed(Board_LED1, 5);
SensorTag_blinkLed(Board_LED2, 5);
break;
}
}*/
/*******************************************************************************
* @fn SensorTag_charValueChangeCB
*
* @brief Callback from Sensor Profile indicating a characteristic
* value change.
*
* @param paramID - parameter ID of the value that was changed.
*
* @return none
*/
void SensorTag_charValueChangeCB(uint8_t serviceID, uint8_t paramID)
{
SensorTag_enqueueMsg(ST_CHAR_CHANGE_EVT, serviceID, paramID);
}
/*******************************************************************************
* @fn SensorTag_blinkLed
*
* @brief Blinks a led 'n' times, duty-cycle 50-50
* @param led - led identifier
* @param nBlinks - number of blinks
*
* @return none
*/
void SensorTag_blinkLed(uint8_t led, uint8_t nBlinks)
{
uint8_t i;
for (i=0; i<nBlinks; i++)
{
PIN_setOutputValue(hGpioPin, led, Board_LED_ON);
delay_ms(BLINK_DURATION);
PIN_setOutputValue(hGpioPin, led, Board_LED_OFF);
delay_ms(BLINK_DURATION);
}
}
/*******************************************************************************
* @fn SensorTag_applyFactoryImage
*
* @brief Load the factory image from external flash and reboot
*
* @return none
*/
void SensorTag_applyFactoryImage(void)
{
if (SensorTag_hasFactoryImage())
{
// Load and launch factory image; page 31 must be omitted
((void (*)(uint32_t, uint32_t, uint32_t))BL_OFFSET)(EFL_ADDR_RECOVERY,
EFL_SIZE_RECOVERY-0x1000,
0);
}
}
/*******************************************************************************
* @fn SensorTag_processCharValueChangeEvt
*
* @brief Process pending Profile characteristic value change
* events. The events are generated by the network task (BLE)
*
* @param serviceID - ID of the affected service
* @param paramID - ID of the affected parameter
*
* @return none
*/
static void SensorTag_processCharValueChangeEvt(uint8_t serviceID,
uint8_t paramID)
{
switch (serviceID)
{
case SERVICE_ID_TMP:
SensorTagTmp_processCharChangeEvt(paramID);
break;
case SERVICE_ID_HUM:
SensorTagHum_processCharChangeEvt(paramID);
break;
case SERVICE_ID_BAR:
SensorTagBar_processCharChangeEvt(paramID);
break;
case SERVICE_ID_MOV:
SensorTagMov_processCharChangeEvt(paramID);
break;
case SERVICE_ID_OPT:
SensorTagOpt_processCharChangeEvt(paramID);
break;
case SERVICE_ID_IO:
SensorTagIO_processCharChangeEvt(paramID);
break;
#ifdef FEATURE_OAD
case SERVICE_ID_CC:
SensorTagConnControl_processCharChangeEvt(paramID);
break;
#endif
#ifdef FEATURE_LCD
case SERVICE_ID_DISPLAY:
SensorTagDisplay_processCharChangeEvt(paramID);
break;
#endif
default:
break;
}
}
/*******************************************************************************
* @fn SensorTag_processStackMsg
*
* @brief Process an incoming stack message.
*
* @param pMsg - message to process
*
* @return none
*/
static void SensorTag_processStackMsg(ICall_Hdr *pMsg)
{
switch (pMsg->event)
{
case GATT_MSG_EVENT:
// Process GATT message
SensorTag_processGATTMsg((gattMsgEvent_t *)pMsg);
break;
default:
// do nothing
break;
}
}
/*******************************************************************************
* @fn SensorTag_processGATTMsg
*
* @brief Process GATT messages
*
* @return none
*/
static void SensorTag_processGATTMsg(gattMsgEvent_t *pMsg)
{
GATT_bm_free(&pMsg->msg, pMsg->method);
}
/*******************************************************************************
* @fn SensorTag_performPeriodicTask
*
* @brief Perform a periodic application task.
*
* @param none
*
* @return none
*/
static void SensorTag_performPeriodicTask(void)
{
#ifdef FEATURE_REGISTER_SERVICE
// Force notification on Register Data (if enabled)
Register_setParameter(SENSOR_DATA,0,NULL);
#endif
}
#if FEATURE_OAD
/*******************************************************************************
* @fn SensorTag_processOadWriteCB
*
* @brief Process a write request to the OAD profile.
*
* @param event - event type:
* OAD_WRITE_IDENTIFY_REQ
* OAD_WRITE_BLOCK_REQ
* @param connHandle - the connection Handle this request is from.
* @param pData - pointer to data for processing and/or storing.
*
* @return None.
*/
static void SensorTag_processOadWriteCB(uint8_t event, uint16_t connHandle,
uint8_t *pData)
{
oadTargetWrite_t *oadWriteEvt = ICall_malloc( sizeof(oadTargetWrite_t) + \
sizeof(uint8_t) * OAD_PACKET_SIZE);
if ( oadWriteEvt != NULL )
{
oadWriteEvt->event = event;
oadWriteEvt->connHandle = connHandle;
oadWriteEvt->pData = (uint8_t *)(&oadWriteEvt->pData + 1);
memcpy(oadWriteEvt->pData, pData, OAD_PACKET_SIZE);
Queue_enqueue(hOadQ, (Queue_Elem *)oadWriteEvt);
// Post the application's semaphore.
Semaphore_post(sem);
}
else
{
// Fail silently.
}
}
#endif //FEATURE_OAD
/*******************************************************************************
* @fn SensorTag_clockHandler
*
* @brief Handler function for clock time-outs.
*
* @param arg - event type
*
* @return none
*/
static void SensorTag_clockHandler(UArg arg)
{
// Store the event.
events |= arg;
// Wake up the application.
Semaphore_post(sem);
}
/*******************************************************************************
* @fn SensorTag_enqueueMsg
*
* @brief Creates a message and puts the message in RTOS queue.
*
* @param event - message event.
* @param serviceID - service identifier
* @param paramID - parameter identifier
*
* @return none
*/
static void SensorTag_enqueueMsg(uint8_t event, uint8_t serviceID, uint8_t paramID)
{
stEvt_t *pMsg;
// Create dynamic pointer to message.
if (pMsg = ICall_malloc(sizeof(stEvt_t)))
{
pMsg->event = event;
pMsg->serviceID = serviceID;
pMsg->paramID = paramID;
// Enqueue the message.
Util_enqueueMsg(appMsgQueue, sem, (uint8_t*)pMsg);
}
}
/*********************************************************************
* @fn SensorTag_resetAllSensors
*
* @brief Reset all sensors, typically when a connection is intentionally
* terminated.
*
* @param none
*
* @return none
*/
static void SensorTag_resetAllSensors(void)
{
SensorTagTmp_reset();
SensorTagHum_reset();
SensorTagBar_reset();
SensorTagMov_reset();
SensorTagOpt_reset();
SensorTagIO_reset();
}
/*!*****************************************************************************
* @fn SensorTag_callback
*
* Interrupt service routine for buttons, relay and MPU
*
* @param handle PIN_Handle connected to the callback
*
* @param pinId PIN_Id of the DIO triggering the callback
*
* @return none
******************************************************************************/
static void SensorTag_callback(PIN_Handle handle, PIN_Id pinId)
{
switch (pinId) {
case Board_KEY_LEFT:
SensorTagKeys_processKeyLeft();
break;
case Board_KEY_RIGHT:
SensorTagKeys_processKeyRight();
break;
case Board_RELAY:
SensorTagKeys_processRelay();
break;
default:
/* Do nothing */
break;
}
}
/*******************************************************************************
* @fn sensorTag_updateAdvertisingData
*
* @brief Update the advertising data with the latest key press status
*
* @return none
*/
void sensorTag_updateAdvertisingData(uint8_t keyStatus)
{
// Record key state in advertising data
advertData[KEY_STATE_OFFSET] = keyStatus;
GAPRole_SetParameter(GAPROLE_ADVERT_DATA, sizeof(advertData), advertData);
}
#ifdef FACTORY_IMAGE
/*******************************************************************************
* @fn SensorTag_saveFactoryImage
*
* @brief Save the current image to external flash as a factory image
*
* @return none
*/
static bool SensorTag_saveFactoryImage(void)
{
bool success;
success = extFlashOpen();
if (success)
{
uint32_t address;
// Erase external flash
for (address= 0; address<EFL_FLASH_SIZE; address+=EFL_PAGE_SIZE)
{
extFlashErase(address,EFL_PAGE_SIZE);
}
// Install factory image
for (address=0; address<EFL_SIZE_RECOVERY && success; address+=EFL_PAGE_SIZE)
{
success = extFlashErase(EFL_ADDR_RECOVERY+address, EFL_PAGE_SIZE);
if (success)
{
size_t offset;
static uint8_t buf[256]; // RAM storage needed due to SPI/DMA limitation
for (offset=0; offset<EFL_PAGE_SIZE; offset+=sizeof(buf))
{
const uint8_t *pIntFlash;
// Copy from internal to external flash
pIntFlash = (const uint8_t*)address + offset;
memcpy(buf,pIntFlash,sizeof(buf));
success = extFlashWrite(EFL_ADDR_RECOVERY+address+offset,
sizeof(buf), buf);
// Verify first few bytes
if (success)
{
extFlashRead(EFL_ADDR_RECOVERY+address+offset, sizeof(buf), buf);
success = buf[2] == pIntFlash[2] && buf[3] == pIntFlash[3];
}
}
}
}
extFlashClose();
}
return success;
}
#endif
/*******************************************************************************
* @fn SensorTag_hasFactoryImage
*
* @brief Determine if the SensorTag has a pre-programmed factory image
* in external flash. Criteria for deciding if a factory image is
* present is that the reset vector stored in external flash is valid.
*
* @return none
*/
static bool SensorTag_hasFactoryImage(void)
{
bool valid;
valid = extFlashOpen();
if (valid)
{
uint16_t buffer[2];
// 1. Check reset vector
valid = extFlashRead(EFL_ADDR_RECOVERY,sizeof(buffer),(uint8_t*)buffer);
if (valid)
{
valid = (buffer[0] != 0xFFFF && buffer[1] != 0xFFFF) &&
(buffer[0] != 0x0000 && buffer[1] != 0x0000);
}
extFlashClose();
}
return valid;
}
/*******************************************************************************
*******************************************************************************/
blow is sensor_drv8830.c
#include "sensor_drv8830.h"
#include "sensor.h"
#include "bsp_i2c.h"
#define SENSOR_I2C_ADDRESS 0xc8
// fault status
#define DRV8830_F_CLEAR 0x80
#define SENSOR_SELECT() bspI2cSelect(BSP_I2C_INTERFACE_0,SENSOR_I2C_ADDRESS)
#define SENSOR_DESELECT() bspI2cDeselect()
#define DRV8830ADDR_00 0xc0
#define DRV8830ADDR_0N 0xc2
#define DRV8830ADDR_01 0xc4
#define DRV8830ADDR_N0 0xc6
#define DRV8830ADDR_NN 0xc8 //write address jp2, jp3 is open
#define DRV8830ADDR_N1 0xca
#define DRV8830ADDR_10 0xcc
#define DRV8830ADDR_1N 0xce
#define DRV8830ADDR_11 0xd0
// fault status
#define DRV8830_F_ILIMIT 0x10
#define DRV8830_F_OTS 0x08
#define DRV8830_F_UVLO 0x04
#define DRV8830_F_OCP 0x02
#define DRV8830_F_FAULT 0x01
// motor status
#define DRV8830_FREE 0x00
#define DRV8830_CW 0x01
#define DRV8830_CCW 0x02
#define DRV8830_BREAK 0x03
// register address
#define DRV8830_CONTROL 0x00
#define DRV8830_FAULT 0x01
// voltage data
#define DRV8830_V_R48 0x06
#define DRV8830_V_R56 0x07
#define DRV8830_V_R64 0x08
#define DRV8830_V_R72 0x09
// (no definition from 0.82V to 4.74V)
#define DRV8830_V_4R82 0x3c
#define DRV8830_V_4R90 0x3d
#define DRV8830_V_4R98 0x3e
#define DRV8830_V_5R06 0x3f
#define DRV8830_V_MIN 0x06
#define DRV8830_V_MAX 0x3f
#define DRV8830_V_RANGE (DRV8830_V_MAX - DRV8830_V_MIN)
// Voltage Control
#define DRV8830_FREE 0x00
#define DRV8830_POSI 0x01
#define DRV8830_NEGA 0x02
#define DRV8830_BREAK 0x03
// Voltage table
#define TBL_OFFSET 0x06
#define TBL_SIZE 58
#define TBL_MAX_VALUE (5.06f)
#define TBL_MIN_VALUE (0.48f)
#define DATA_SIZE 2
/* Sensor data size */
#define DATA_SIZE 2
#define REGISTER_LENGTH 2
static uint8_t buf[DATA_SIZE];
static uint16_t val;
const float voltage_table [] = {
0.48, 0.56, 0.64, 0.72, 0.80, 0.88, 0.96, 1.04,
1.12, 1.20, 1.29, 1.37, 1.45, 1.53, 1.61, 1.69,
1.77, 1.85, 1.93, 2.01, 2.09, 2.17, 2.25, 2.33,
2.41, 2.49, 2.57, 2.65, 2.73, 2.81, 2.89, 2.97,
3.05, 3.13, 3.21, 3.29, 3.37, 3.45, 3.53, 3.61,
3.69, 3.77, 3.86, 3.94, 4.02, 4.10, 4.18, 4.26,
4.34, 4.42, 4.50, 4.58, 4.66, 4.74, 4.82, 4.90,
4.98, 5.06
};
bool sensorDrv8830Init(void){
return sensorDrv8830Enable(true);
}
bool sensorDrv8830Enable(bool enable){
bool success;
uint8_t pwm_rate = 0;
if (!SENSOR_SELECT())
return false;
buf[0]=0x00;
success = sensorReadReg(DRV8830_FAULT, &buf[0], REGISTER_LENGTH);
val = DRV8830_F_CLEAR;
success = sensorWriteReg(DRV8830_FAULT, (uint8_t *)&val, REGISTER_LENGTH);
if(enable)
val = DRV8830_CW;
else
val = DRV8830_FREE;
success = sensorWriteReg(DRV8830_CONTROL, (uint8_t *)&val, REGISTER_LENGTH);
pwm_rate = DRV8830_V_MAX;
val = (pwm_rate << 2) + DRV8830_CW;
success = sensorWriteReg(DRV8830_CONTROL, (uint8_t *)&val, REGISTER_LENGTH);
SensorTag_blinkLed(Board_LED1,10);
SENSOR_DESELECT();
return success;
}
void sensorDrv8830Start(void)
{
}
void sensorDrv8830Speed(float speed) {
uint8_t direction = 0;
uint8_t pwm_rate = 0;
uint8_t dt[2];
bool success;
if (speed == 0.0f ){
pwm_rate = DRV8830_V_MIN;
direction = DRV8830_FREE;
} else if (speed > 0.0f){
pwm_rate = (uint8_t)(DRV8830_V_RANGE * speed) + DRV8830_V_MIN;
direction = DRV8830_CW;
} else if (speed < 0.0f){
speed *= -1;
pwm_rate = (uint8_t)(DRV8830_V_RANGE * speed) + DRV8830_V_MIN;
direction = DRV8830_CCW;
}
if (pwm_rate > DRV8830_V_MAX){
pwm_rate = DRV8830_V_MAX;
} else if (pwm_rate < DRV8830_V_MIN){
pwm_rate = DRV8830_V_MIN;
}
dt[0] = DRV8830_CONTROL;
dt[1] = (pwm_rate << 2) + direction;
// success = sensorReadReg(DRV8830_CONTROL, (uint8_t *)&val,sizeof(val));
// if (success)
// {
// if (!SENSOR_SELECT())
// return;
SENSOR_SELECT();
bspI2cWrite((uint8_t *)dt, 2);
SENSOR_DESELECT();
//}
}
void sensorDrv8830Voltage(float volt) {
uint8_t direction = 0;
uint8_t pwm_rate = 0;
uint8_t dt[2];
bool success;
success = sensorReadReg(DRV8830_CONTROL, (uint8_t *)&val,sizeof(val));
if (volt < 0){
direction = DRV8830_NEGA;
volt *= -1;
} else {
direction = DRV8830_POSI;
}
if (volt >= TBL_MAX_VALUE) {
pwm_rate = TBL_SIZE + TBL_OFFSET - 1;
} else {
for (uint32_t i = 0; i < TBL_SIZE; i++){
if (volt < voltage_table[i]) {
//printf("n=%d, voltage_table[i]=%f\r\n", i, voltage_table[i]);
if (i == 0){
pwm_rate = 0;
direction = DRV8830_FREE;
} else {
pwm_rate = i + TBL_OFFSET;
}
break;
}
}
}
//printf("volt=%f, pwm=0x%x, dir=%d\r\n", volt, pwm_rate, direction);
dt[0] = DRV8830_CONTROL;
dt[1] = (pwm_rate << 2) + direction;
if (success)
{
if (!SENSOR_SELECT())
return;
success = bspI2cWrite((uint8_t *)dt, 2);
SENSOR_DESELECT();
}
}
uint8_t sensorDrv8830Status() {
uint8_t dt[2];
bool success;
dt[0] = DRV8830_FAULT;
success = sensorReadReg(DRV8830_CONTROL, (uint8_t *)&val,sizeof(val));
if (success)
{
if (!SENSOR_SELECT())
return dt[0];
success = bspI2cWriteRead((uint8_t *)dt, 1, (uint8_t *)dt, 1);
SENSOR_DESELECT();
}
return dt[0];
}
void sensorDrv8830Reset() {
uint8_t dt[2];
bool success;
dt[0] = DRV8830_FAULT;
dt[1] = DRV8830_F_CLEAR;
if (success)
{
if (!SENSOR_SELECT())
return;
success = bspI2cWrite((uint8_t *)dt, 2);
SENSOR_DESELECT();
}
}
I used a beagle i2c analyzer.
But the results are bmp, opt for slave address, slave address of drv8830 did not appear.
This means i2c communication did not occur. (Cc2650STK, drv8830 is a new product)
If so, the accompanying source code is the problem?
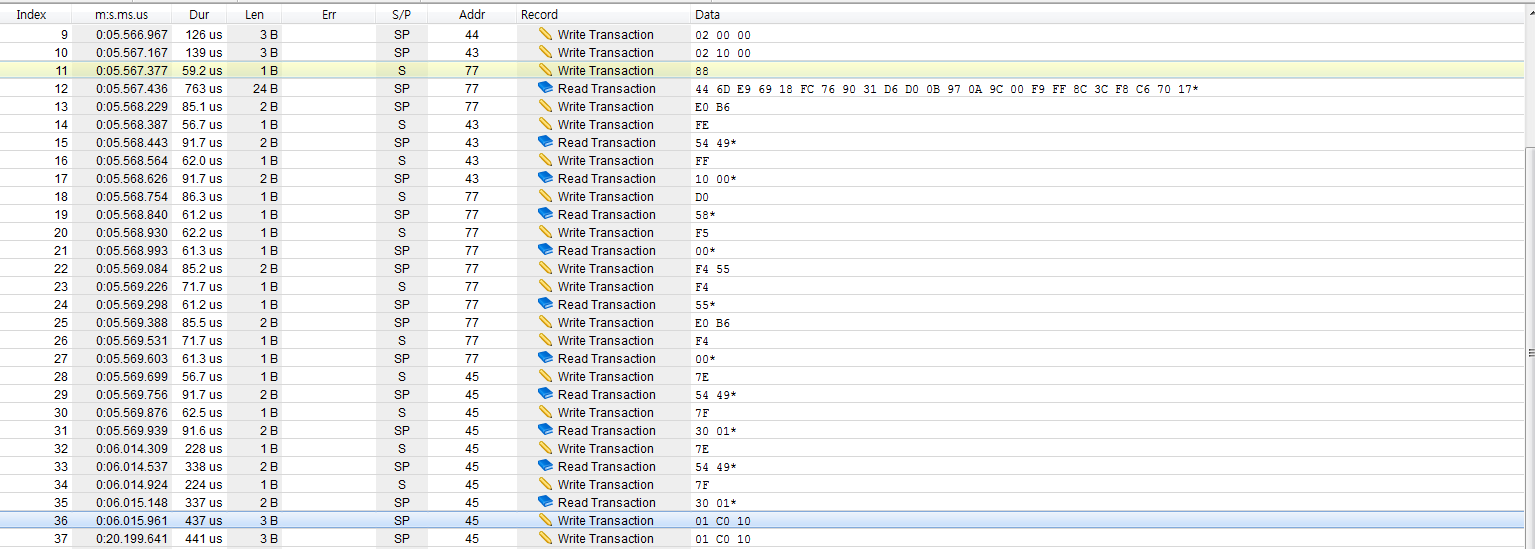
Please help me
Thank you.
