Part Number: CC2640R2F
Tool/software: TI-RTOS
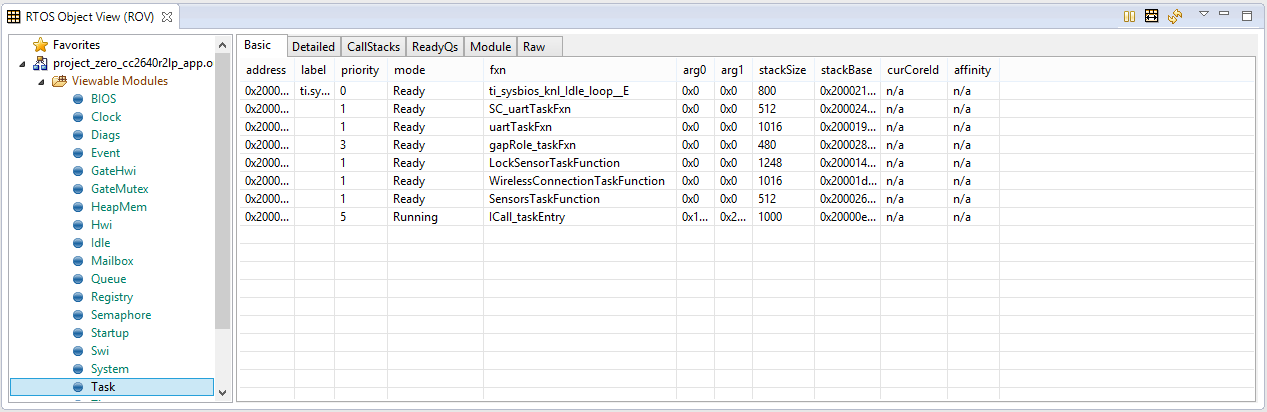
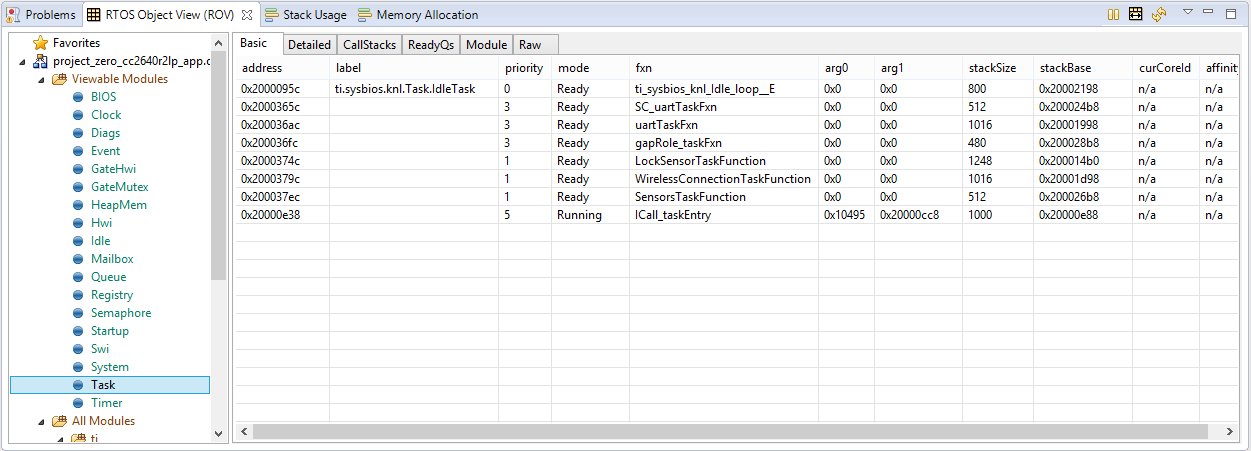
Hello, could you help with the solution of the next problem. The project is based on project_zero_cc2640r2lp_app. After adding personal tasks, the following situation occurs: all tasks are created without errors, but when the project is started, they are always in the READY state (checked by points), and only the ICall_taskEntry task is in the RUNNING state:
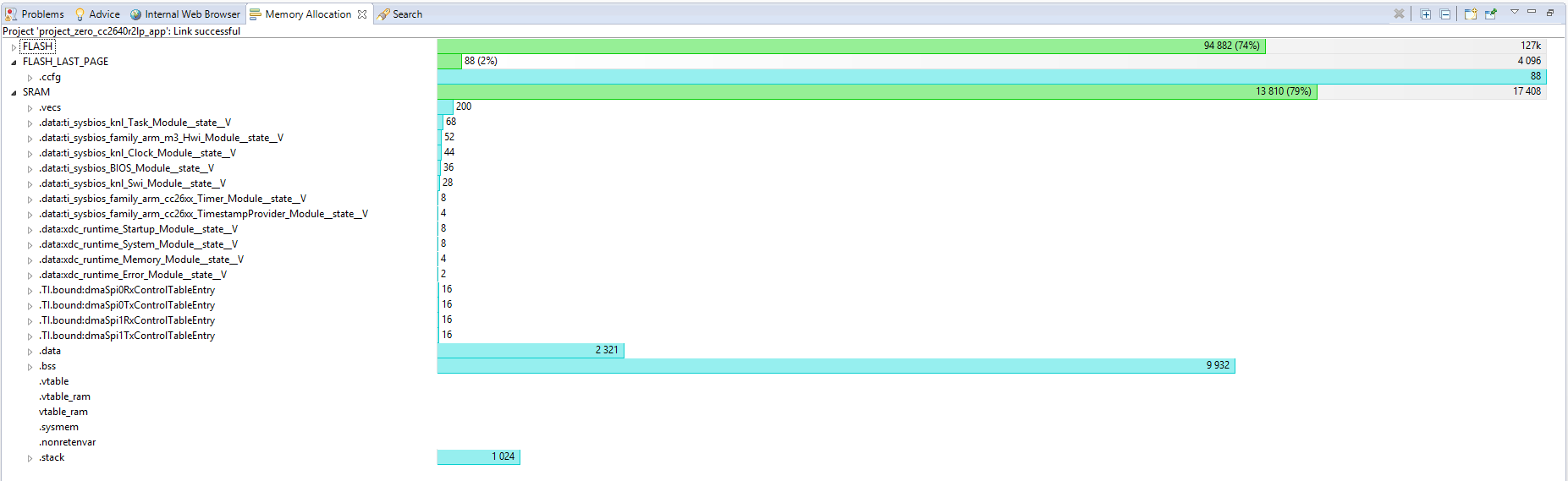
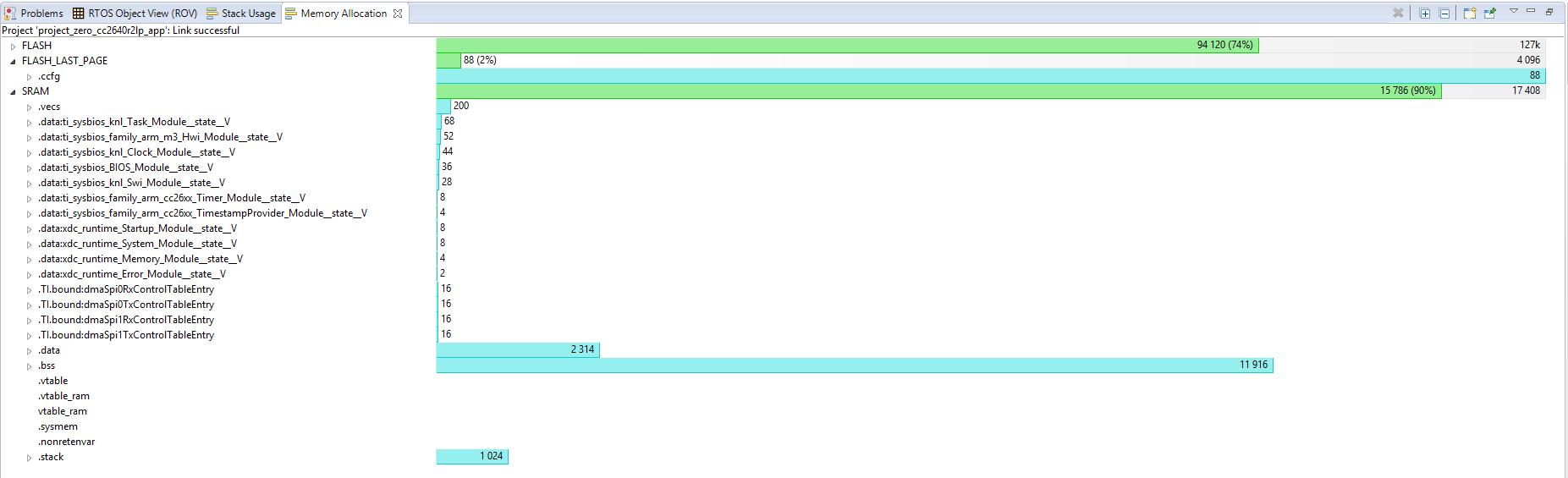
In addition, the picture of memory allocation:
What are the causes of this situation?