- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.


Tool/software: Code Composer Studio
Hello,
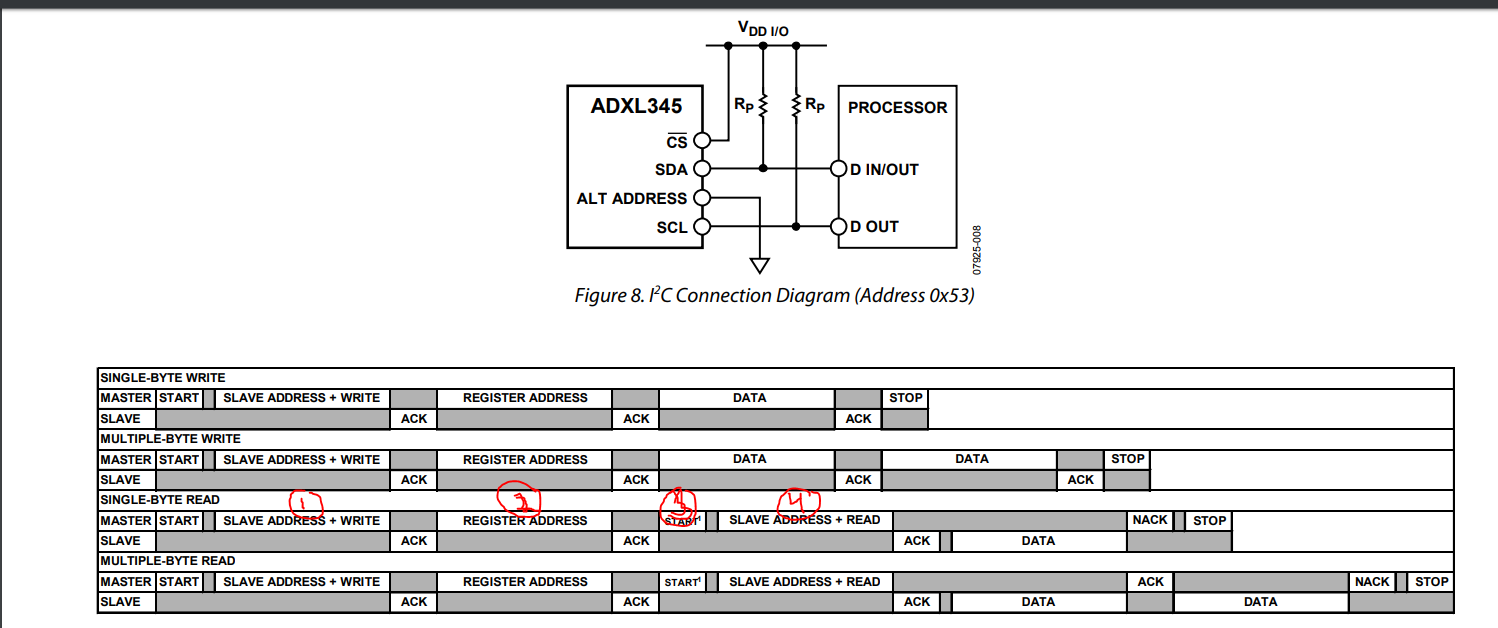
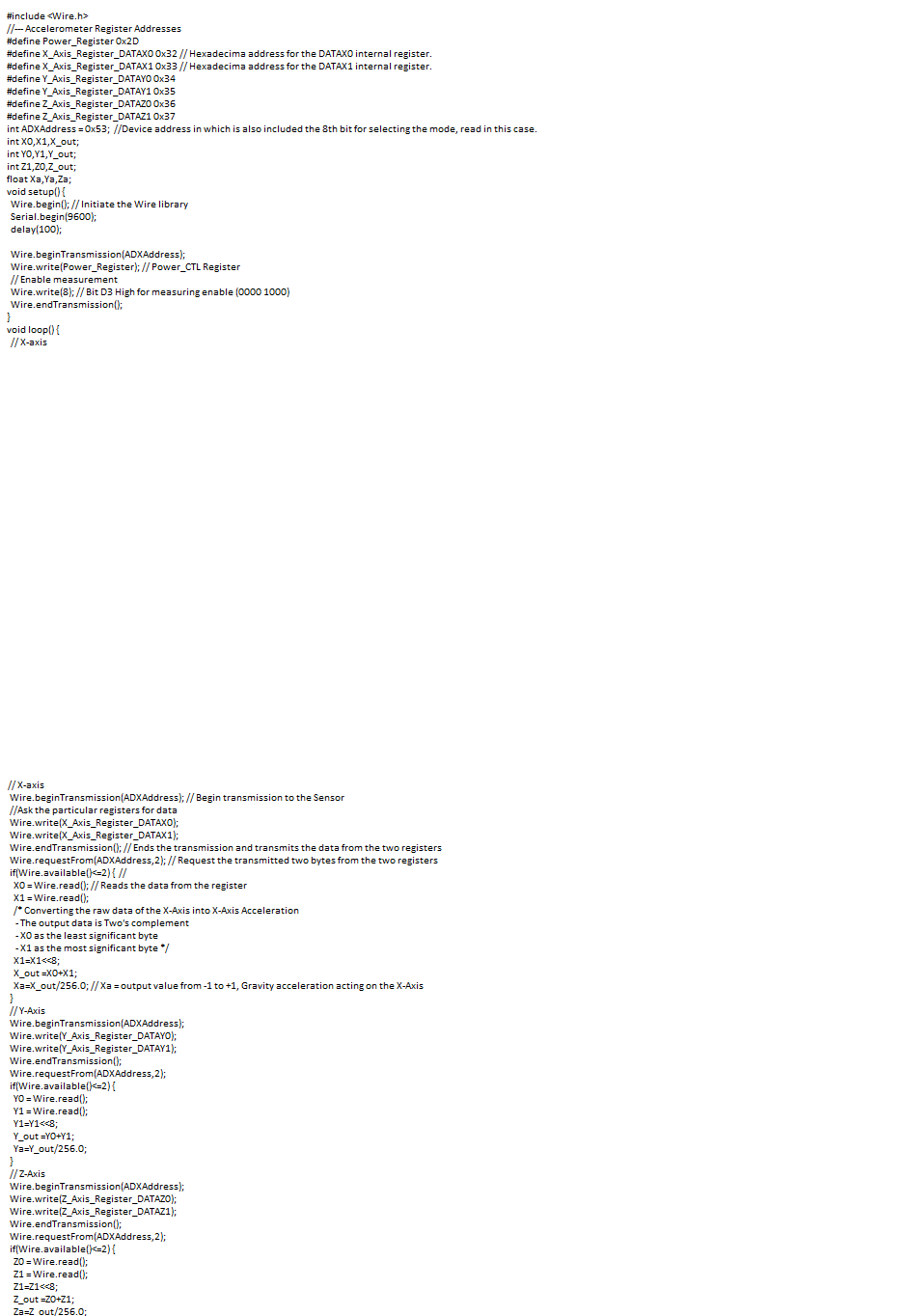
i am interfacing the gy80 accelerometer (ADXL345) with cc2640r2F . my problem is that i m not getting right output values
plz check my program and resolve my problem
____________________________________________________________________________________________________________________________________________________________________
#include <stdint.h>
#include <stddef.h>
#include <unistd.h>
/* Driver Header files */
#include <ti/drivers/GPIO.h>
#include <ti/drivers/I2C.h>
#include <ti/display/Display.h>
#include <xdc/runtime/system.h>
/* Example/Board Header files */
#include "Board.h"
#define TASKSTACKSIZE 640
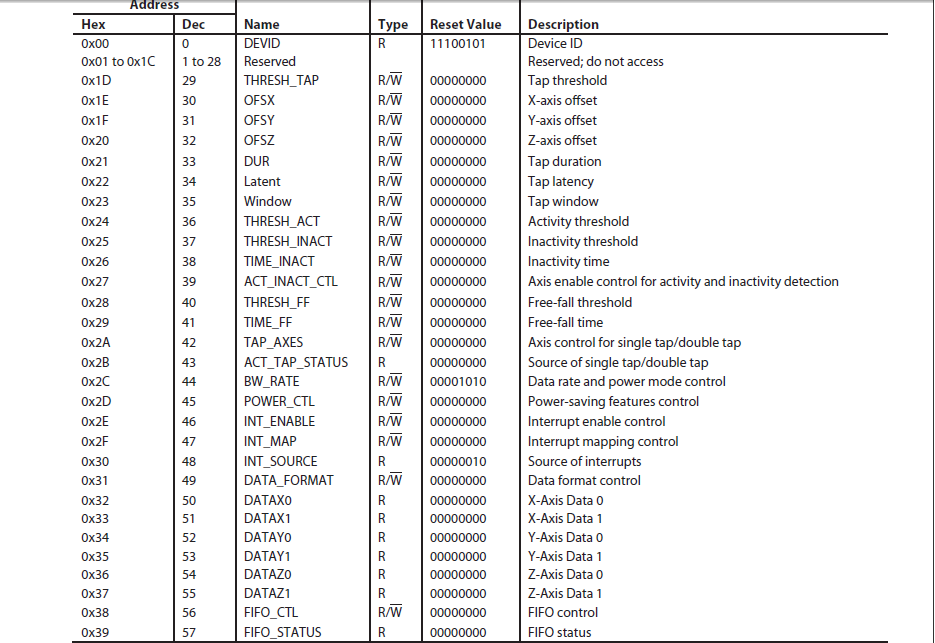
#define DATAX0 0X32 /*X-Axis Data 0 */
#define DATAX1 0X33 /*X-Axis Data 1 */
#define DATAY0 0X34 /*Y-Axis Data 0 */
#define DATAY1 0X35 /*Y-Axis Data 1 */
#define DATAZ0 0X36 /*Z-Axis Data 0 */
#define DATAZ1 0X37 /*Z-Axis Data 1 */
#define DEVID 0x00 /* Device address */
static Display_Handle display;
/*
* ======== mainThread ========
*/
void *mainThread(void *arg0)
{
unsigned int i;
uint8_t txBuffer[8];
uint8_t rxBuffer[8];
I2C_Handle i2c;
I2C_Params i2cParams;
I2C_Transaction i2cTransaction;
/* Call driver init functions */
Display_init();
GPIO_init();
I2C_init();
/* Open the HOST display for output */
display = Display_open(Display_Type_UART, NULL);
if (display == NULL) {
while (1);
}
/* Turn on user LED */
GPIO_write(Board_GPIO_LED0, Board_GPIO_LED_ON);
Display_printf(display, 0, 0, "Starting the i2ctmp007 example\n");
/* Create I2C for usage */
I2C_Params_init(&i2cParams);
i2cParams.bitRate = I2C_400kHz;
i2c = I2C_open(Board_I2C_TMP, &i2cParams);
if (i2c == NULL) {
Display_printf(display, 0, 0, "Error Initializing I2C\n");
while (1);
}
else {
Display_printf(display, 0, 0, "I2C Initialized!\n");
}
txBuffer[0] = DEVID;
txBuffer[1] = DEVID;
txBuffer[2] = DATAX0;
txBuffer[3] = DATAX1;
txBuffer[4] = DATAY0;
txBuffer[5] = DATAY1;
txBuffer[6] = DATAZ0;
txBuffer[7] = DATAZ1;
i2cTransaction.slaveAddress = Board_TMP_ADDR; /* 0x53 i2c address*/
i2cTransaction.writeBuf = txBuffer;
i2cTransaction.writeCount = 2;
i2cTransaction.readBuf = rxBuffer;
i2cTransaction.readCount = 8;
for (i = 0; i < 20; i++)
{
Display_printf(display, 0, 0, "Sample %d \n", i); /* number of samples*/
if (I2C_transfer(i2c, &i2cTransaction))
{
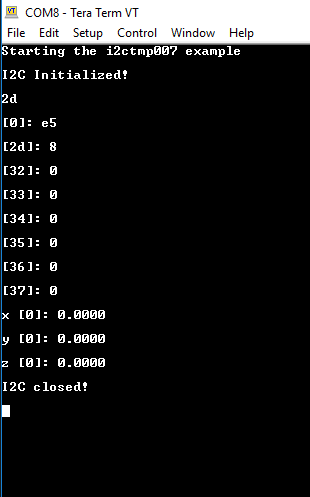
Display_printf(display, 0, 0, "value %x: %x \n", txBuffer[0], rxBuffer[0]);
Display_printf(display, 0, 0, "value %x: %x \n", txBuffer[1], rxBuffer[1]);
Display_printf(display, 0, 0,"value %x: %x \n", txBuffer[2], rxBuffer[2]);
Display_printf(display, 0, 0, "value %x: %x \n", txBuffer[3], rxBuffer[3]);
Display_printf(display, 0, 0, "value %x: %x \n", txBuffer[4], rxBuffer[4]);
Display_printf(display, 0, 0, "value %x: %x \n", txBuffer[5], rxBuffer[5]);
Display_printf(display, 0, 0, "value %x: %x \n", txBuffer[6], rxBuffer[6]);
Display_printf(display, 0, 0, "value %x: %x \n", txBuffer[7], rxBuffer[7]);
}
else
{
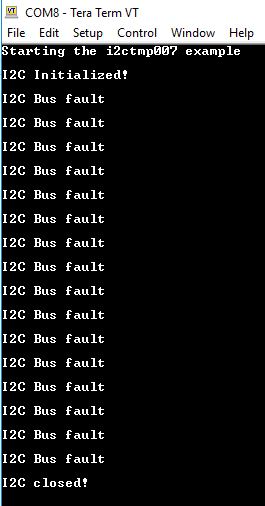
Display_printf(display, 0, 0, "I2C Bus fault\n");
}
/* Sleep for 1 second */
sleep(1);
}
/* Deinitialized I2C */
I2C_close(i2c);
Display_printf(display, 0, 0, "I2C closed!\n");
return (NULL);
}
____________________________________________________________________________________________________________________________________________________
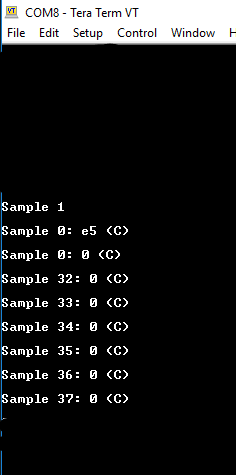
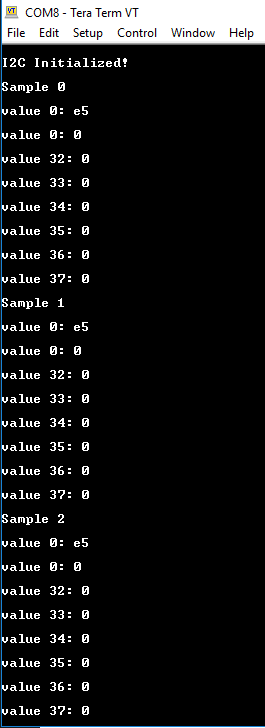
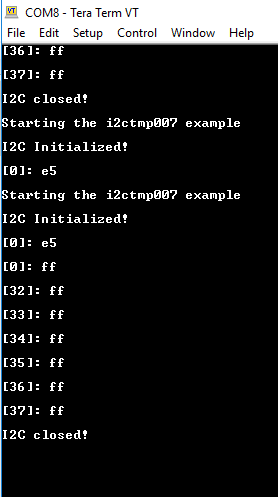
output