- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
Tool/software: Code Composer Studio
Using two CC2640 LAUNCHPAD , serve as SPI SLAVE & SPI MASTER respectively . SPI MASTER writes data and SPI SALVE reads data . However , when SPI SLAVE reads data , only the first byte that SPI MASTER writes can be read , during the state of SPI CSN keeping at the low level . Where am I wrong when configuring the SPI CSN ?
1. configuration of SPI SLAVE
(1)SPI GPIO configuration
#define CC2640R2_LAUNCHXL_SPI0_MISO IOID_6 /* RF1.20 */ #define CC2640R2_LAUNCHXL_SPI0_MOSI IOID_7 /* RF1.18 */ #define CC2640R2_LAUNCHXL_SPI0_CLK IOID_10 /* RF1.16 */ #define CC2640R2_LAUNCHXL_SPI0_CSN IOID_20
(2)BoardGpioInitTable
const PIN_Config BoardGpioInitTable[] = {
CC2640R2_LAUNCHXL_PIN_RLED | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* LED initially off */
CC2640R2_LAUNCHXL_PIN_GLED | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* LED initially off */
CC2640R2_LAUNCHXL_PIN_BTN1 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_BOTHEDGES | PIN_HYSTERESIS, /* Button is active low */
CC2640R2_LAUNCHXL_PIN_BTN2 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_BOTHEDGES | PIN_HYSTERESIS, /* Button is active low */
//CC2640R2_LAUNCHXL_SPI_FLASH_CS | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MIN, /* External flash chip select */
CC2640R2_LAUNCHXL_UART_RX | PIN_INPUT_EN | PIN_PULLDOWN, /* UART RX via debugger back channel */
/*-----当不使用UART时,应该将UART TX拉低,避免漏电 -----*/
CC2640R2_LAUNCHXL_UART_TX | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL,
/*CC2640R2_LAUNCHXL_UART_TX | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL,*/ /* UART TX via debugger back channel */
CC2640R2_LAUNCHXL_SPI0_MOSI | PIN_INPUT_EN | PIN_PULLDOWN, /* SPI master out - slave in */
CC2640R2_LAUNCHXL_SPI0_MISO | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL, /* SPI master in - slave out */
CC2640R2_LAUNCHXL_SPI0_CLK | PIN_INPUT_EN | PIN_PULLDOWN, /* SPI clock */
CC2640R2_LAUNCHXL_SPI0_CSN | PIN_BM_INPUT_EN | PIN_PULLDOWN,
/*-----这里的配置是多余的,在ccfg.c中配置bootloader back door就足够 -----*/
/*BOOTLOADER_BACKDOOR | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH,*/
PIN_TERMINATE
};(3)SPI_init
static void Spi_task_init(void)
{
SPI_init(); // Initialize the SPI driver
// Init SPI and specify non-default parameters
SPI_Params_init(¶ms);
params.bitRate = 1000000;
params.dataSize = 8; // 8-bit data size
params.frameFormat = SPI_POL0_PHA0;
params.mode = SPI_SLAVE;
params.transferMode= SPI_MODE_BLOCKING;
// Open the SPI and perform the transfer
handle = SPI_open(Board_SPI0, ¶ms);
}(4)SPI read
uint8_t frame_total_dummy[32] = { 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,
0x00,0x00};
uint8_t SPI_transfer_frame_read(SPI_Handle handle, SPI_Transaction *transaction)
{
uint8_t uint8t_ret = 0;
bool bool_ret = true;
transaction->count = 32;
transaction->rxBuf = &frame_total_dummy[0];
transaction->txBuf = NULL;
bool_ret = SPI_transfer(handle, transaction);
if(bool_ret == false)
{
return 0;
}
return uint8t_ret;
}
2. configuration of SPI MASTER
(1)SPI GPIO configuration
#define CC2640R2_LAUNCHXL_SPI0_MISO IOID_6 /* RF1.20 */ #define CC2640R2_LAUNCHXL_SPI0_MOSI IOID_7 /* RF1.18 */ #define CC2640R2_LAUNCHXL_SPI0_CLK IOID_10 /* RF1.16 */ #define CC2640R2_LAUNCHXL_SPI0_CSN IOID_20 //PIN_UNASSIGNED
(2)BoardGpioInitTable
const PIN_Config BoardGpioInitTable[] = {
CC2640R2_LAUNCHXL_PIN_RLED | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* LED initially off */
CC2640R2_LAUNCHXL_PIN_GLED | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX, /* LED initially off */
CC2640R2_LAUNCHXL_PIN_BTN1 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_BOTHEDGES | PIN_HYSTERESIS, /* Button is active low */
CC2640R2_LAUNCHXL_PIN_BTN2 | PIN_INPUT_EN | PIN_PULLUP | PIN_IRQ_BOTHEDGES | PIN_HYSTERESIS, /* Button is active low */
//CC2640R2_LAUNCHXL_SPI_FLASH_CS | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MIN, /* External flash chip select */
CC2640R2_LAUNCHXL_UART_RX | PIN_INPUT_EN | PIN_PULLDOWN, /* UART RX via debugger back channel */
/*-----当不使用UART时,应该将UART TX拉低,避免漏电 -----*/
CC2640R2_LAUNCHXL_UART_TX | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL,
/*CC2640R2_LAUNCHXL_UART_TX | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL,*/ /* UART TX via debugger back channel */
CC2640R2_LAUNCHXL_SPI0_MOSI| PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL, /* SPI master out - slave in */
CC2640R2_LAUNCHXL_SPI0_MISO| PIN_INPUT_EN | PIN_PULLDOWN, /* SPI master in - slave out */
CC2640R2_LAUNCHXL_SPI0_CLK | PIN_INPUT_EN | PIN_PULLDOWN, /* SPI clock */
CC2640R2_LAUNCHXL_SPI0_CSN | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MIN,
/*-----这里的配置是多余的,在ccfg.c中配置bootloader back door就足够 -----*/
/*BOOTLOADER_BACKDOOR | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH,*/
PIN_TERMINATE
};(3)SPI_init
static void Spi_task_init(void)
{
SPI_init(); // Initialize the SPI driver
// Init SPI and specify non-default parameters
SPI_Params_init(¶ms);
params.bitRate = 1000000;
params.dataSize = 8; // 8-bit data size
params.frameFormat = SPI_POL0_PHA0;
params.mode = SPI_MASTER;
params.transferMode= SPI_MODE_BLOCKING;
// Open the SPI and perform the transfer
handle = SPI_open(Board_SPI0, ¶ms);
hPins = PIN_open(&SPI_CSN_PinState, SPI_CSN_PinTable);
interrupt_event_init();
mcu_msg_fifo_init();
}
(4)SPI read
uint8_t txBuffer[] = { 0x5A ,0x5A ,0xA5 ,0xA5 ,0x01 ,0xFF ,0x00 ,0x16 ,0x33 ,0x44 ,
0x55 ,0x66 ,0x33 ,0x44 ,0x55 ,0x66 ,0x33 ,0x44 ,0x55 ,0x66 ,
0x33 ,0x44 ,0x55 ,0x66 ,0x33 ,0x44 ,0x55 ,0x66 ,0x33 ,0x44 ,
0x00 ,0xDB};
uint8_t SPI_transfer_frame_write(PIN_Handle pin_handle,SPI_Handle handle,SPI_Transaction *transaction,uint8_t *buffer, size_t size)
{
uint8_t uint8t_ret = 0;
bool bool_ret = true;
transaction->count = size;
transaction->txBuf = buffer;
transaction->rxBuf = NULL;
PIN_setOutputValue(pin_handle, CC2640R2_LAUNCHXL_SPI0_CSN_MANUAL, 0);
bool_ret = SPI_transfer(handle, transaction);
if(bool_ret == true)
{
uint8t_ret = 1;
}
else
{
uint8t_ret = 0;
}
PIN_setOutputValue(pin_handle, CC2640R2_LAUNCHXL_SPI0_CSN_MANUAL, 1);
return uint8t_ret;
}
static void Spi_taskFxn(UArg a0, UArg a1)
{
Spi_task_init();
SPI_transfer_frame_write(handle, &transaction,txBuffer, 32);
}
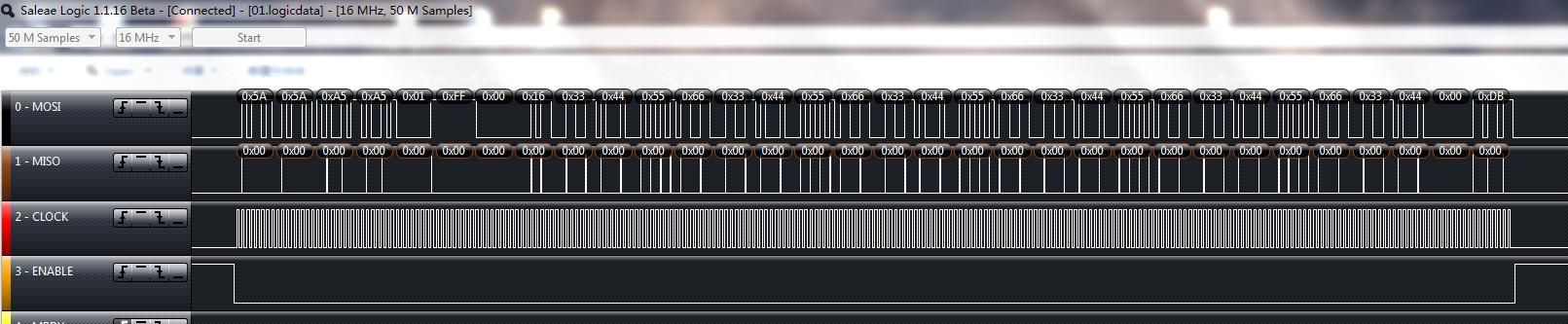
3.Using the configuration above , 32 bytes of data were written during the state of SPI CSN keeping at the low level ,as shown in picture 1.

picture 1
4.Connecting SPI MASTER and SPI SLAVE, as shown in picture 2 and picture 3.

picture2

picture 3
5.SPI SLAVE can read only the first byte----0X5A
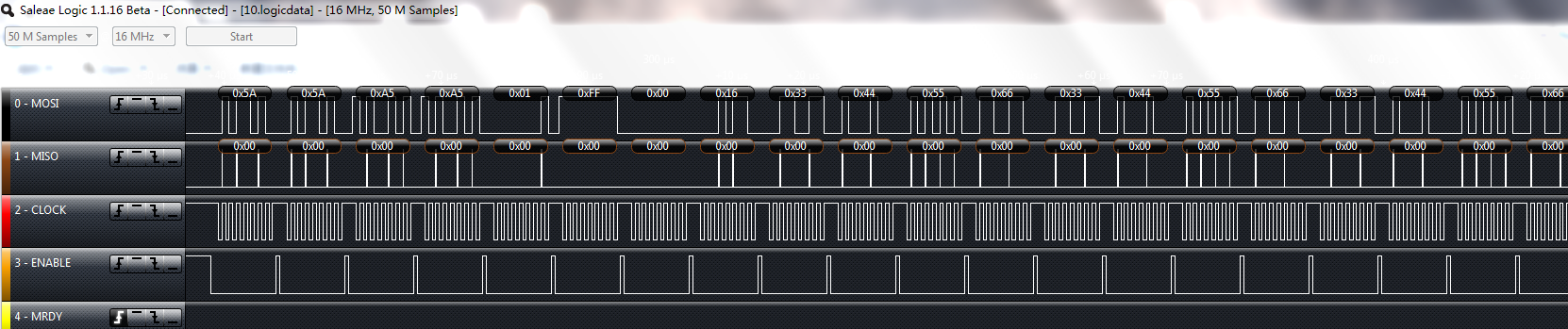
6.If SPI MASTER using the default SPI CSN configuration , SPI SLAVE can read all the datas that SPI MASTER writes .SPI MASTER writes 32 bytes of data during the state of SPI CSN keeping at the low level , as shown in picture 4.

picture 4
Where am I wrong when configuring the SPI CSN ?
7.attachments
(1)simplelink_cc2640r2_sdk_1_40_00_45 can be downloaded here :
(2)CC2640R2 launchpad can be bought here:
8.my developing environment
CCS:Code Composer Studio 7.2.0
SDK:simplelink_cc2640r2_sdk_1_40_00_45
hardware:CC26640R2 launchpad develop kit
VS: Microsoft Visual C++ 2010 Express
OS:win7 64 bit