- Ask a related questionWhat is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

Tool/software: TI-RTOS
Hello,
I am running my own application on CC2650MODA. I have imported the simple_central_cc2650lp_app and stack. I have removed the simple central application part and add my own application file.
If I received a message with 16 Bytes this leads to a error. After my app has received the message evaluation works and my app is connected to the peer device. So everything seems to to be oke. But when I know push a button of (which is connected with a DIO of my CC2650) or receive another message my application crash.
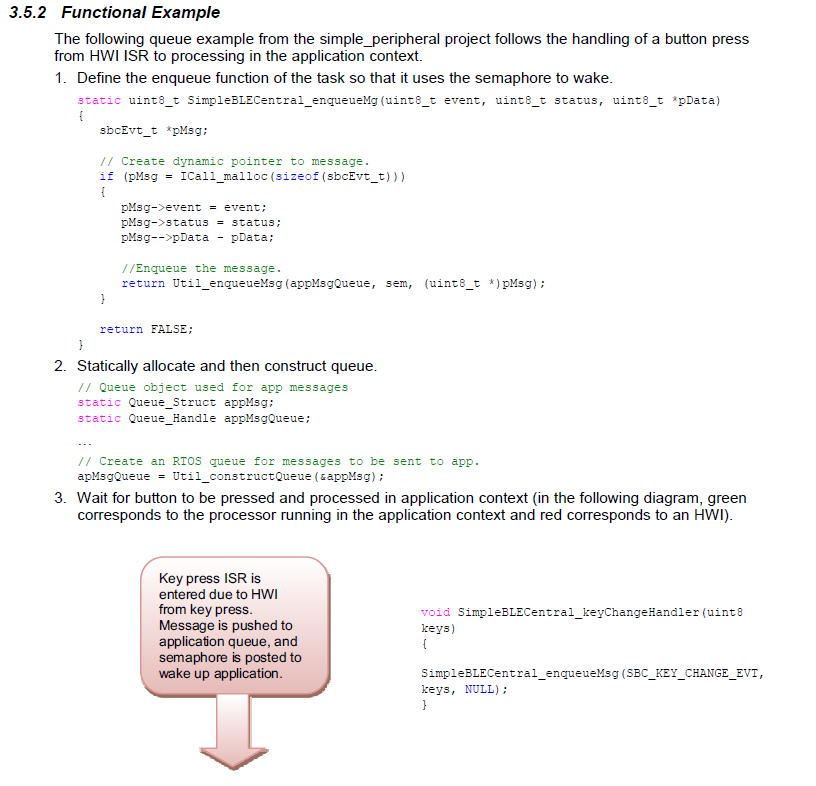
For example when I push a button after I have evaluated the button I am calling the a function to inform the application task.
Icall this function:
uint8_t Util_enqueueMsg(Queue_Handle msgQueue,
#ifdef ICALL_EVENTS
Event_Handle event,
#else //!ICALL_EVENTS
Semaphore_Handle sem,
#endif //ICALL_EVENTS
uint8_t *pMsg)
{
queueRec_t *pRec;
// Allocated space for queue node.
#ifdef USE_ICALL
if ((pRec = ICall_malloc(sizeof(queueRec_t))))
#else
if ((pRec = (queueRec_t *)malloc(sizeof(queueRec_t))))
#endif
{
pRec->pData = pMsg;
// This is an atomic operation
Queue_put(msgQueue, &pRec->_elem);
// Wake up the application thread event handler.
#ifdef ICALL_EVENTS
if (event)
{
Event_post(event, UTIL_QUEUE_EVENT_ID);
}
#else //!ICALL_EVENTS
/*
* NEW ##
*/
// semCount = Semaphore_getCount(sem);
/*
* NEW ##
*/
if (sem)
{
Semaphore_post(sem);
}
/*
* NEW ##
*/
// semCount = Semaphore_getCount(sem);
/*
* NEW ##
*/
#endif //ICALL_EVENTS
return TRUE;
}
// Free the message.
#ifdef USE_ICALL
ICall_free(pMsg);
#else
free(pMsg);
#endif
return FALSE;
}In this function gets the "ICall_malloc(..)" function called.
I Can step in this function with the debugger to the call"errno = ICall_dispatcher(&args.hdr);"
Then the application chrashes.
static void *ICall_malloc(uint_least16_t size)
{
static volatile uint32_t malloc;
static volatile uint32_t nByte[16];
static volatile uint8_t i;
if(i<16)
{
nByte[i] = size;
i++;
}
else
{
i = 0;
nByte[i] = size;
}
ICall_AllocArgs args;
ICall_Errno errno;
args.hdr.service = ICALL_SERVICE_CLASS_PRIMITIVE;
args.hdr.func = ICALL_PRIMITIVE_FUNC_MALLOC;
args.size = size;
errno = ICall_dispatcher(&args.hdr);
if (errno != ICALL_ERRNO_SUCCESS)
{
return NULL;
}
/*
* NEW
*/
else
{
malloc++;
}
/*
* NEW END
*/
return args.ptr;
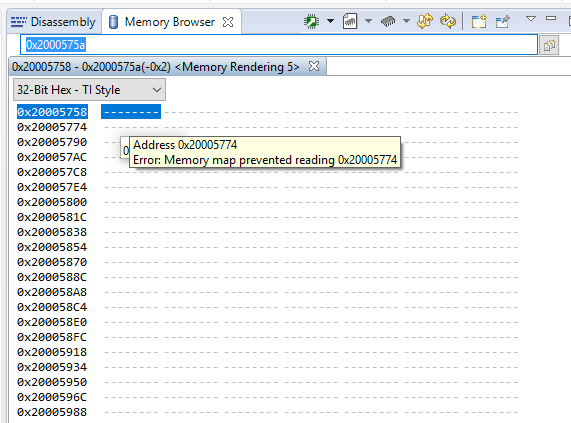
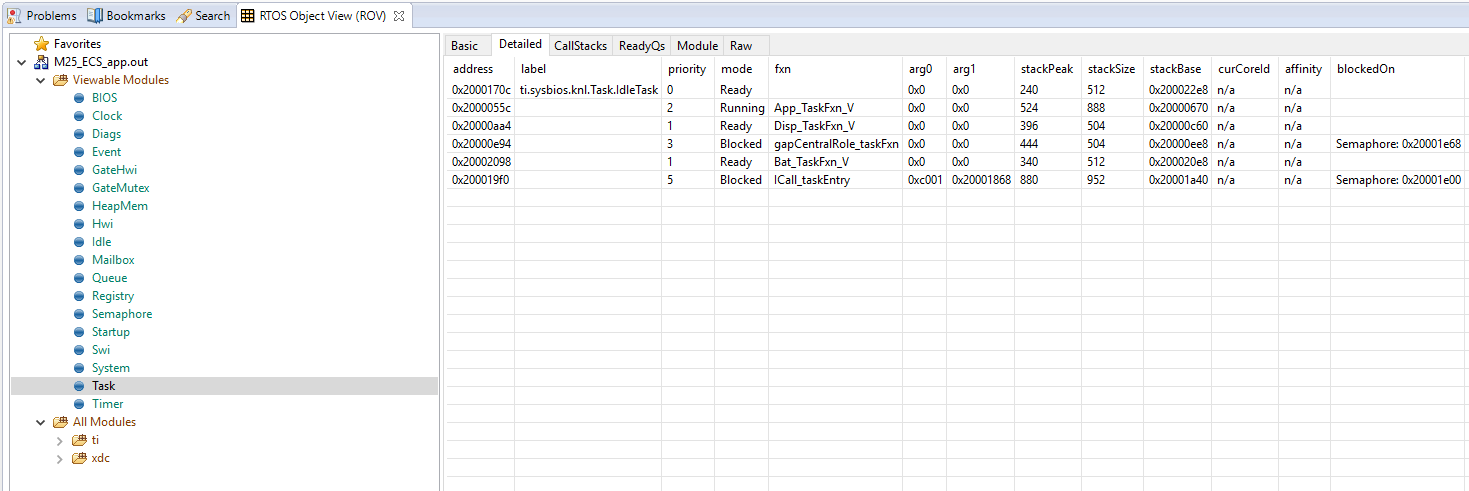
}I have looked at the RTOS Object View->HWI.
If i look at the Erorr Adress i get the message "Error memory map prevented reading 0x..."
Could you please help me?