


Other Parts Discussed in Thread: SYSBIOS, CC2640
Tool/software: Code Composer Studio
Hi,
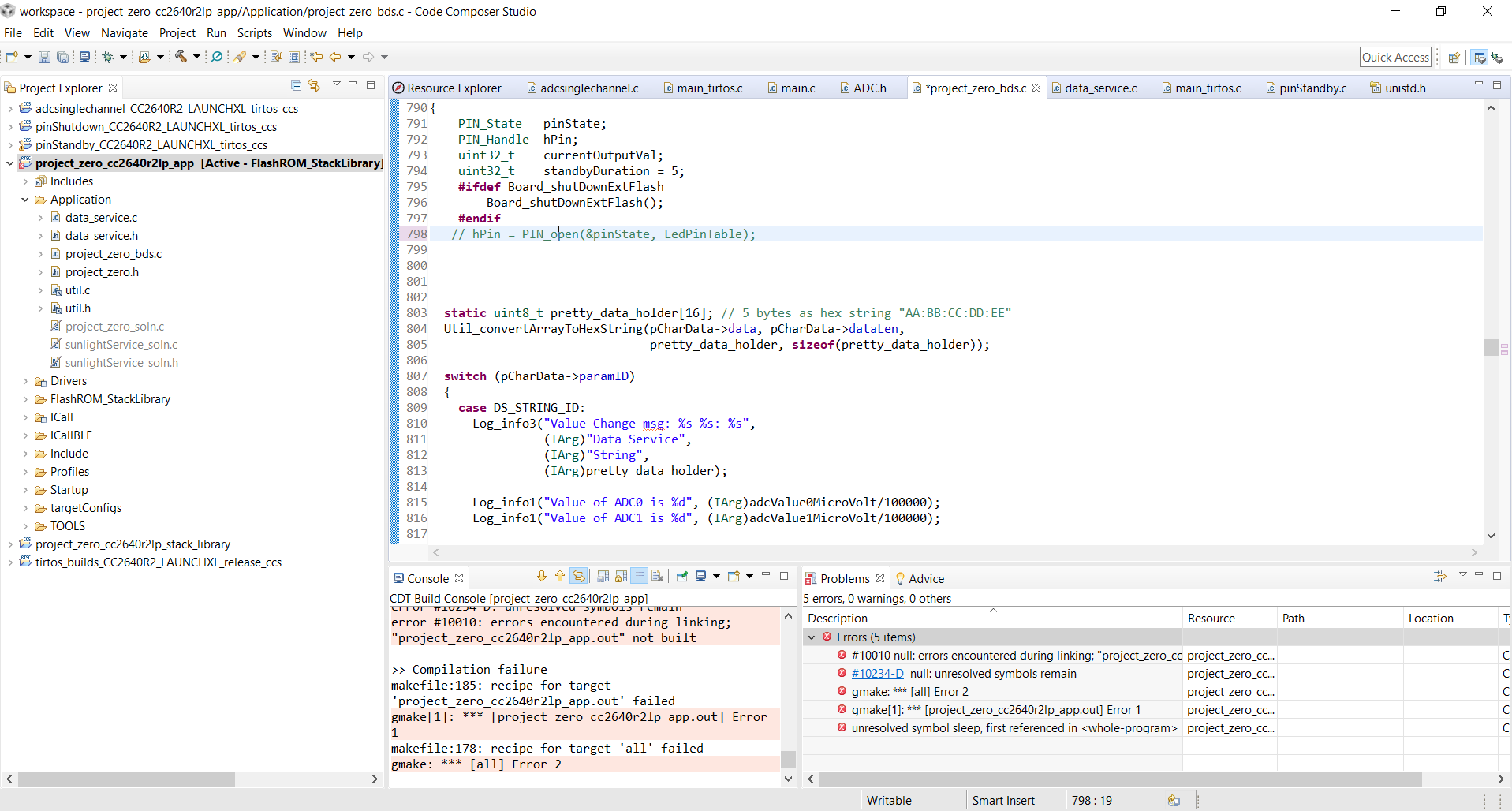
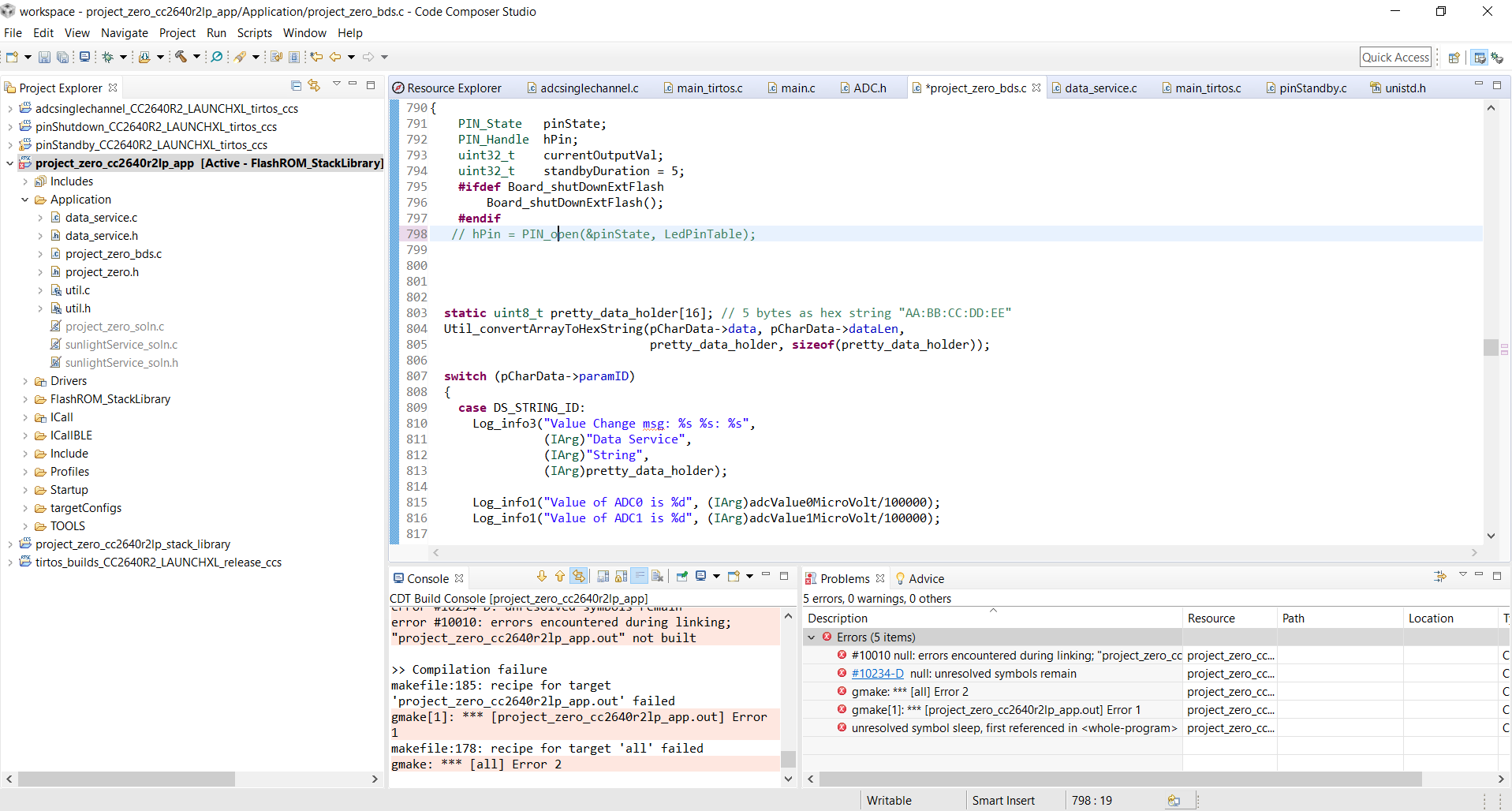
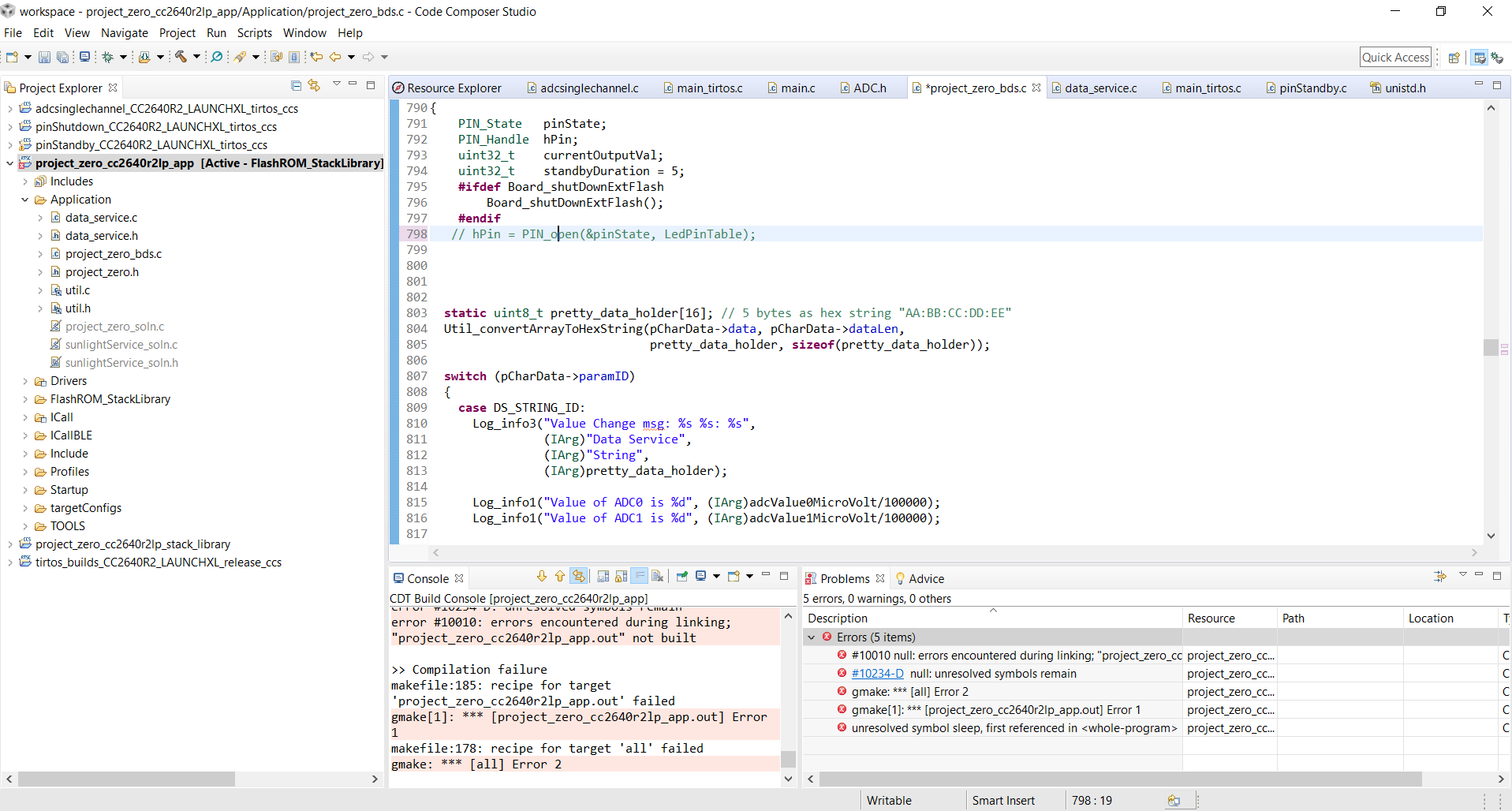
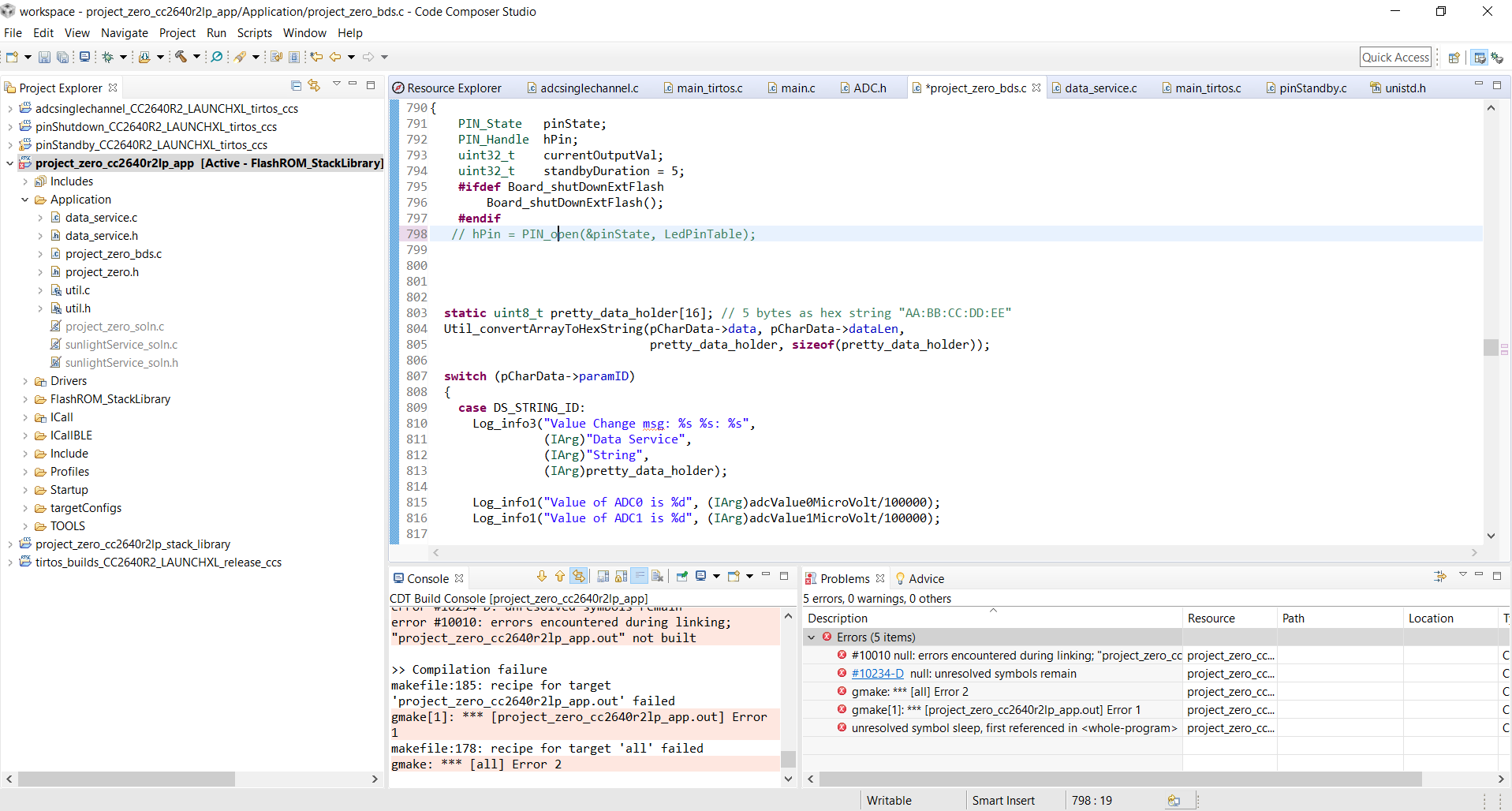
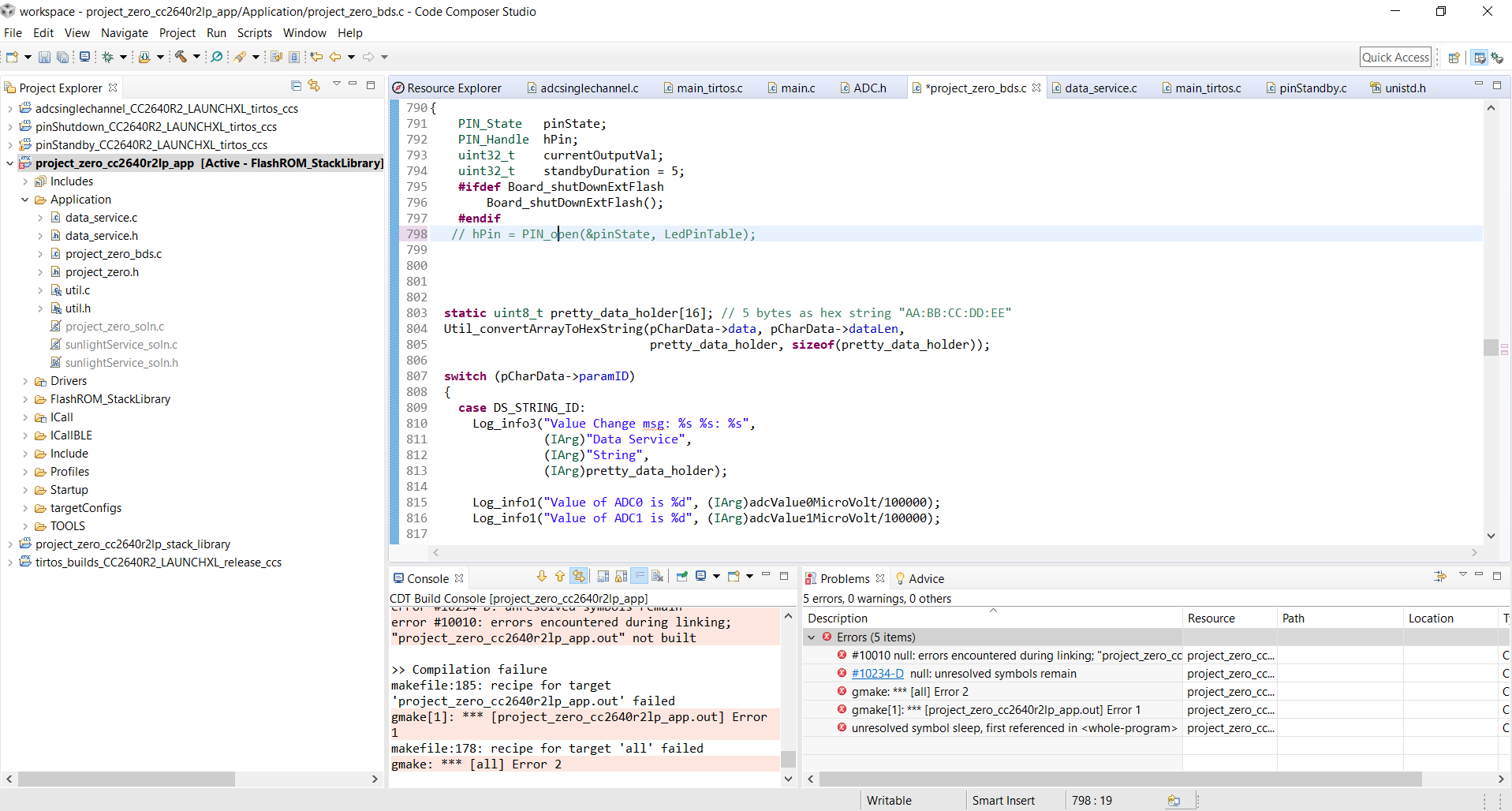
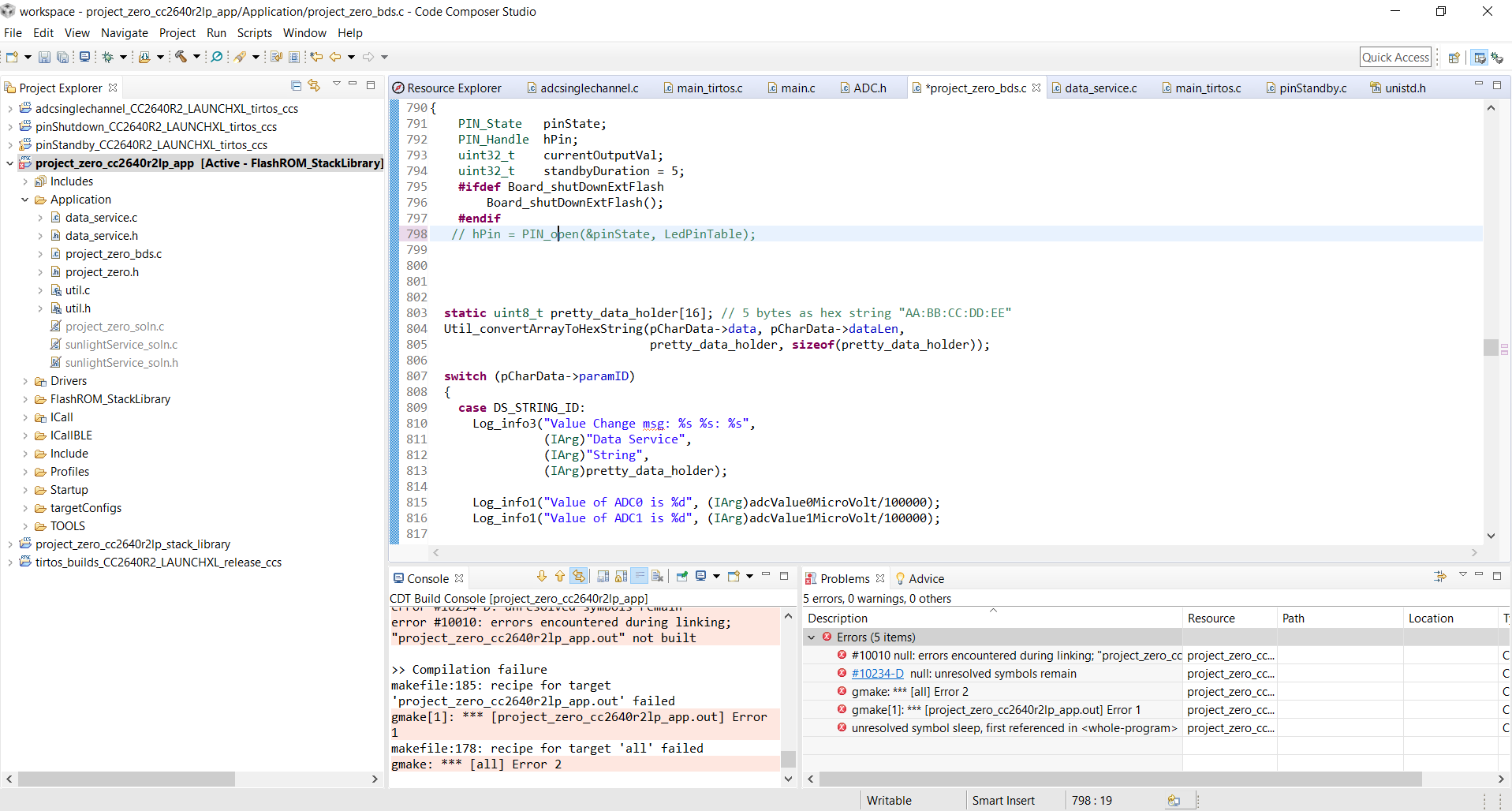
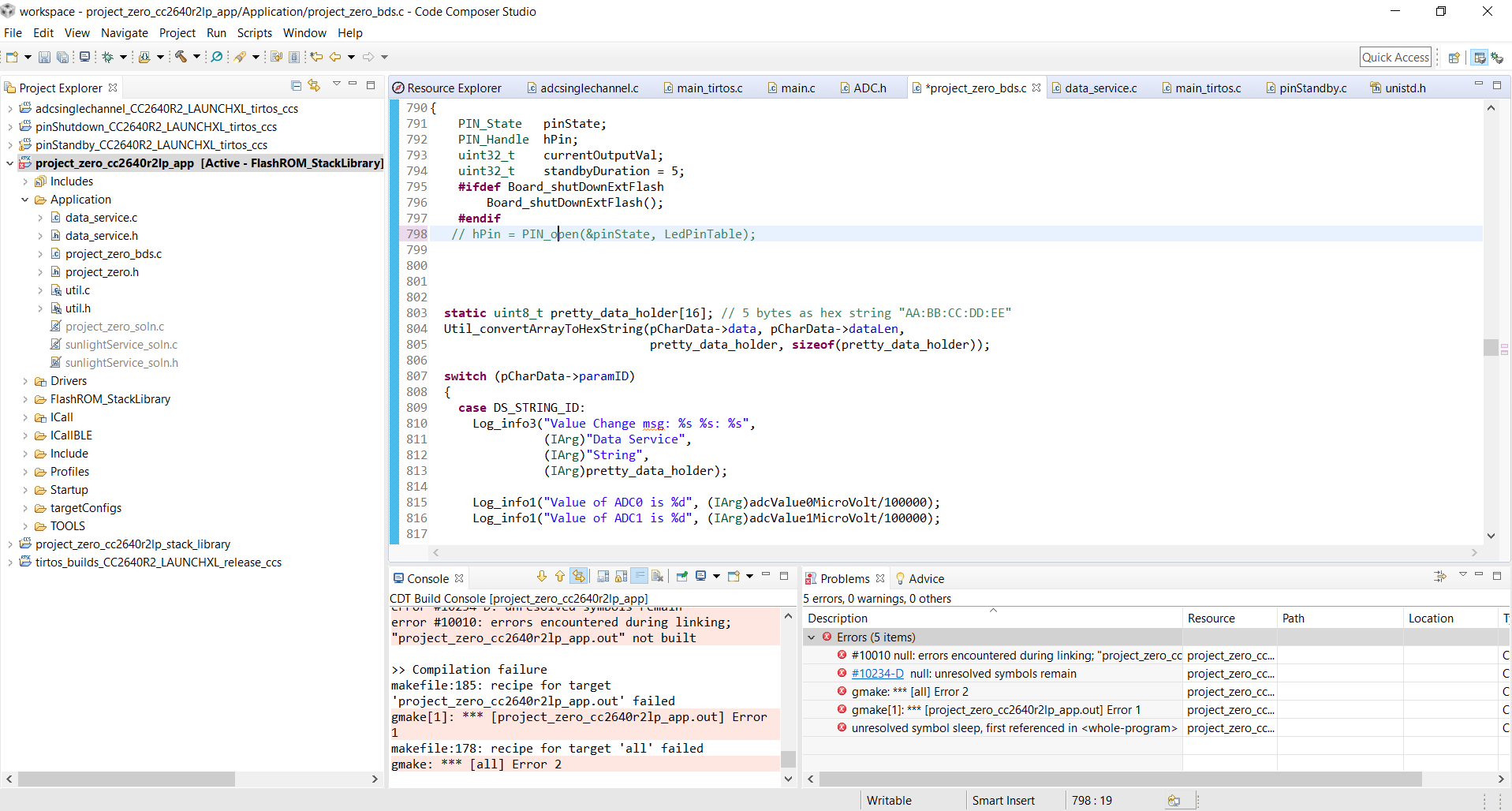
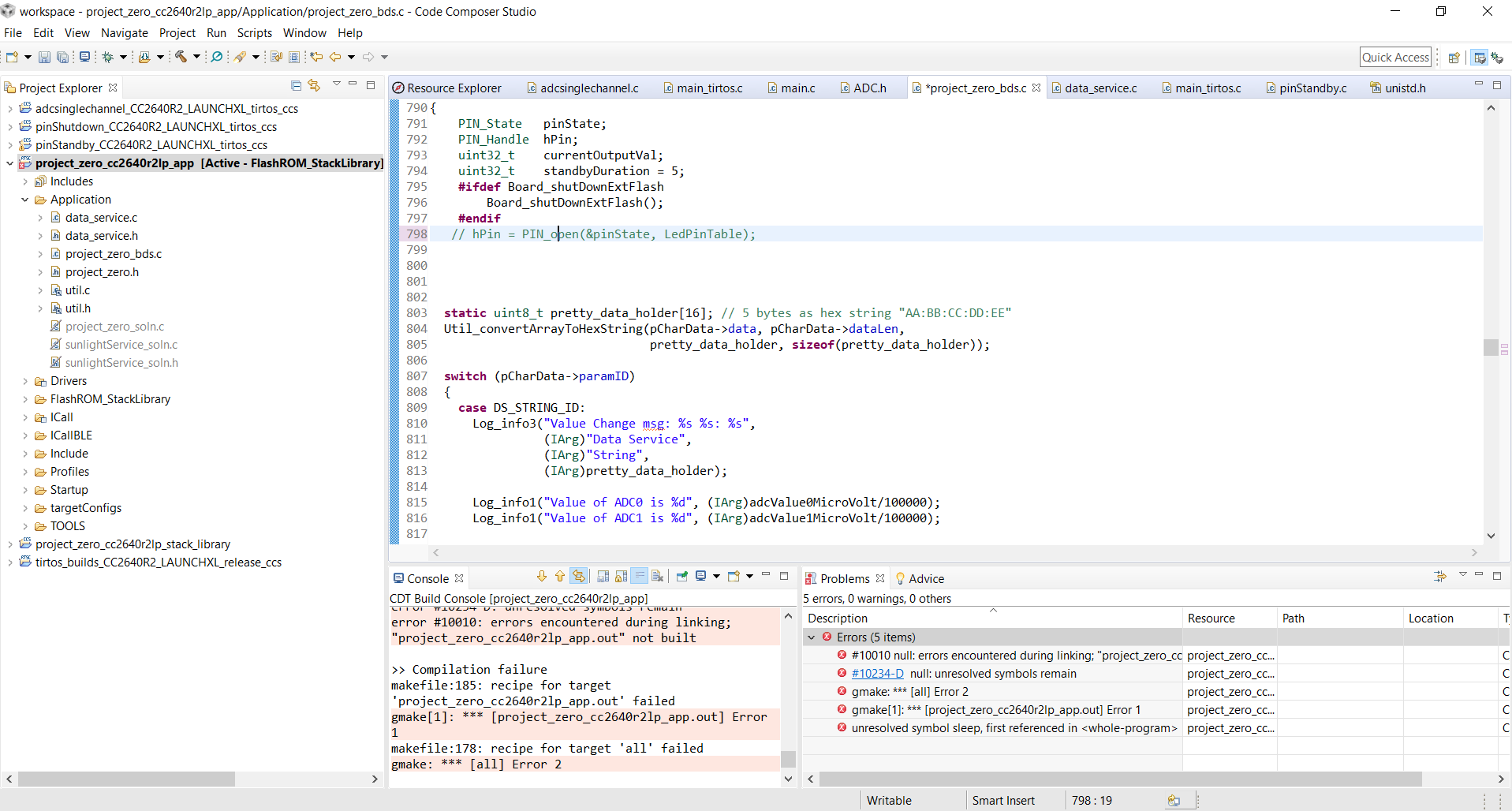
I am trying to compile Project_Zero by making some modifications to it i.e.: like adding functions as sleep to test the standby mode functionality. However, I am getting the error below. I tried to solve it by including path to posix library, but the error still keeps appearing. Kindly suggest a solution.
Description Resource Path Location Type
#10010 null: errors encountered during linking; "project_zero_cc2640r2lp_app.out" not built project_zero_cc2640r2lp_app C/C++ Problem
<a href="processors.wiki.ti.com/.../10234"> null: unresolved symbols remain project_zero_cc2640r2lp_app C/C++ Problem
gmake: *** [all] Error 2 project_zero_cc2640r2lp_app C/C++ Problem
gmake[1]: *** [project_zero_cc2640r2lp_app.out] Error 1 project_zero_cc2640r2lp_app C/C++ Problem
unresolved symbol sleep, first referenced in <whole-program> project_zero_cc2640r2lp_app C/C++ Problem
Best Regards,
--Zain Kabir


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}