


Tool/software: Code Composer Studio
Hi Sir,
Base on customer request I need generate 18.52ms ISR by GPTimer when some function work of system.
I reference GPTimer tutorial (http://dev.ti.com/tirex/content/simplelink_cc26x2_sdk_2_20_00_36/docs/tidrivers/doxygen/html/_g_p_timer_c_c26_x_x_8h.html#a30f6c028f0abea0b35c3be3d1609ea9b) to implement test code to test GPTimer.
elow is myself test result:
GPTimer seting : GPT_CONFIG_16BIT + GPT_MODE_PERIODIC_UP + GPTimerCC26XX_DEBUG_STALL_ON
CPU Frequence : 48MHz
Load Value :
923075 => ISR = 19.20ms
905659 => ISR = 18.84ms
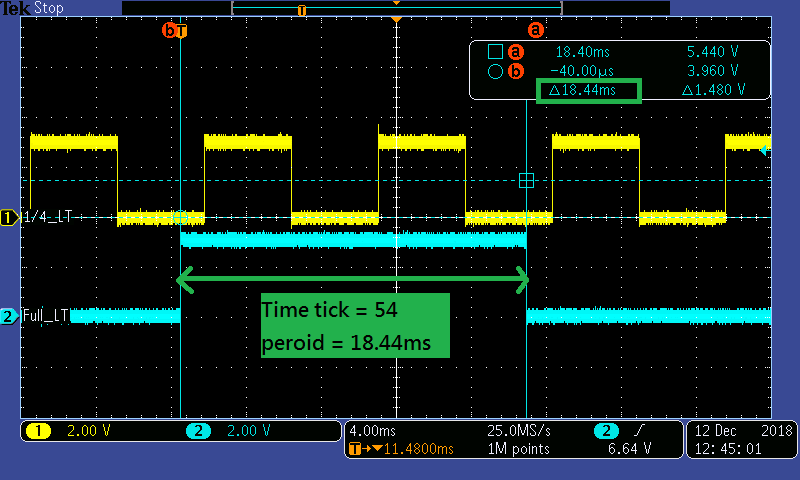
888887 => ISR = 18.44ms(Closest 18.52ms)
872726 => ISR = 18.08ms
Test as below:
/*
* ======== GPTimer_Test ========
*/
/* For usleep() */
#include <unistd.h>
#include <stddef.h>
/* Driver Header files */
//#include <ti/drivers/PWM.h>
/* Example/Board Header files */
#include "Board.h"
#include "ti/drivers/timer/GPTimerCC26XX.h"
#include <xdc/std.h>
#include <xdc/runtime/Error.h>
#include <xdc/runtime/Types.h>
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Clock.h>
#include <ti/sysbios/knl/Task.h>
#if 0
/* Period and duty in microseconds */
uint16_t pwmPeriod = 3000;
uint16_t duty = 0;
uint16_t dutyInc = 750;
/* Sleep time in microseconds */
//uint32_t time = 50000; //50ms
//uint32_t time = 1000000; //1S
PWM_Handle pwm1 = NULL;
PWM_Handle pwm2 = NULL;
PWM_Params params;
#endif
GPTimerCC26XX_Handle hTimer_One_Fourth_Line_Time; // 1/4 line time
uint32_t One_Fourth_Line_Time_Timer_Interrupt_Count = 0;
uint8_t One_Fourth_Line_Time_LED_OUTPUT_ON = 0;
GPTimerCC26XX_Handle hTimer_Full_Line_Time; // full line time
uint32_t Full_Line_Time_Timer_Interrupt_Count = 0;
uint8_t Full_Line_Time_LED_OUTPUT_ON = 0;
uint8_t PK_Timer_Disable = 0;
uint8_t Timer_Enable = 0;
void One_Fourth_Line_Time_timerCallback(GPTimerCC26XX_Handle handle, GPTimerCC26XX_IntMask interruptMask) {
// interrupt callback code goes here. Minimize processing in interrupt.
One_Fourth_Line_Time_Timer_Interrupt_Count++;
#if 0
PWM_setDuty(pwm1, duty);
if (pwm2) {
PWM_setDuty(pwm2, duty);
}
duty = (duty + dutyInc);
if (duty == pwmPeriod || (!duty)) {
dutyInc = - dutyInc;
}
#endif
if(!One_Fourth_Line_Time_LED_OUTPUT_ON)
{
/* Turn on user LED */
GPIO_write(Board_GPIO_LED0, Board_GPIO_LED_ON);
/* Turn on user LED */
//GPIO_write(Board_GPIO_LED1, Board_GPIO_LED_ON);
One_Fourth_Line_Time_LED_OUTPUT_ON = 1;
}
else
{
/* Turn on user LED */
GPIO_write(Board_GPIO_LED0, Board_GPIO_LED_OFF);
/* Turn on user LED */
//GPIO_write(Board_GPIO_LED1, Board_GPIO_LED_OFF);
One_Fourth_Line_Time_LED_OUTPUT_ON = 0;
}
}
void Full_Line_Time_timerCallback(GPTimerCC26XX_Handle handle, GPTimerCC26XX_IntMask interruptMask) {
// interrupt callback code goes here. Minimize processing in interrupt.
Full_Line_Time_Timer_Interrupt_Count++;
if(!Full_Line_Time_LED_OUTPUT_ON)
{
/* Turn on user LED */
//GPIO_write(Board_GPIO_LED0, Board_GPIO_LED_ON);
/* Turn on user LED */
GPIO_write(Board_GPIO_LED1, Board_GPIO_LED_ON);
Full_Line_Time_LED_OUTPUT_ON = 1;
}
else
{
/* Turn on user LED */
//GPIO_write(Board_GPIO_LED0, Board_GPIO_LED_OFF);
/* Turn on user LED */
GPIO_write(Board_GPIO_LED1, Board_GPIO_LED_OFF);
Full_Line_Time_LED_OUTPUT_ON = 0;
}
}
/*
* ======== mainThread ========
* Task periodically increments the PWM duty for the on board LED.
*/
void *mainThread(void *arg0)
{
GPTimerCC26XX_Params params;
GPTimerCC26XX_Params_init(¶ms);
params.width = GPT_CONFIG_16BIT;
params.mode = GPT_MODE_PERIODIC_UP;
params.debugStallMode = GPTimerCC26XX_DEBUG_STALL_ON;
// 1/4 line time
hTimer_One_Fourth_Line_Time = GPTimerCC26XX_open(CC2640R2_LAUNCHXL_GPTIMER0A, ¶ms);
// full line time
hTimer_Full_Line_Time = GPTimerCC26XX_open(CC2640R2_LAUNCHXL_GPTIMER1A, ¶ms);
//hTimer_Full_Line_Time = GPTimerCC26XX_open(CC2640R2_LAUNCHXL_GPTIMER0B, ¶ms_XD);
if(hTimer_One_Fourth_Line_Time == NULL || hTimer_Full_Line_Time == NULL) {
//Log_error0("Failed to open GPTimer");
//Task_exit();
while (1);
}
Types_FreqHz freq;
BIOS_getCpuFreq(&freq);
// 1/4 line time
GPTimerCC26XX_Value loadVal = freq.lo / 215 - 1; //216 = 4.63ms, 30 = 33ms, 100 = 10ms
GPTimerCC26XX_setLoadValue(hTimer_One_Fourth_Line_Time, loadVal);
GPTimerCC26XX_registerInterrupt(hTimer_One_Fourth_Line_Time, One_Fourth_Line_Time_timerCallback, GPT_INT_TIMEOUT);
// full line time
// GPTimerCC26XX_Value need dedicated variable ... PK 20181211+
GPTimerCC26XX_Value loadVal_XD = freq.lo / 54 - 1; // 54(Load Value = 888887) = 18.44ms
GPTimerCC26XX_setLoadValue(hTimer_Full_Line_Time, loadVal_XD);
GPTimerCC26XX_registerInterrupt(hTimer_Full_Line_Time, Full_Line_Time_timerCallback, GPT_INT_TIMEOUT);
GPTimerCC26XX_start(hTimer_One_Fourth_Line_Time);
GPTimerCC26XX_start(hTimer_Full_Line_Time);
/* Loop forever incrementing the PWM duty */
while (1) {
if(PK_Timer_Disable && Timer_Enable)
{
GPTimerCC26XX_stop(hTimer_One_Fourth_Line_Time);
GPTimerCC26XX_stop(hTimer_Full_Line_Time);
Timer_Enable = 0;
}
else if(!PK_Timer_Disable && !Timer_Enable)
{
GPTimerCC26XX_start(hTimer_One_Fourth_Line_Time);
GPTimerCC26XX_start(hTimer_Full_Line_Time);
Timer_Enable = 1;
}
Task_sleep(BIOS_WAIT_FOREVER);
}
}
Is workable if we need improve GPTimer accuracy to 0.01ms? (ISR = 18.51ms~18.53ms)
Could you please check for me?
Many thanks.

