A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.
If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
RTOS/CC2640R2F: Read and Writing to 8 Pins Simultaneously . PIN_setPortOutputValue PIN_getPortOutputValue Example code needed.
I hope you are doing well. I need to set 8 pins in open drain + pull up mode and Set it output. Can I read write port? Which pins I can use as port? any example code?
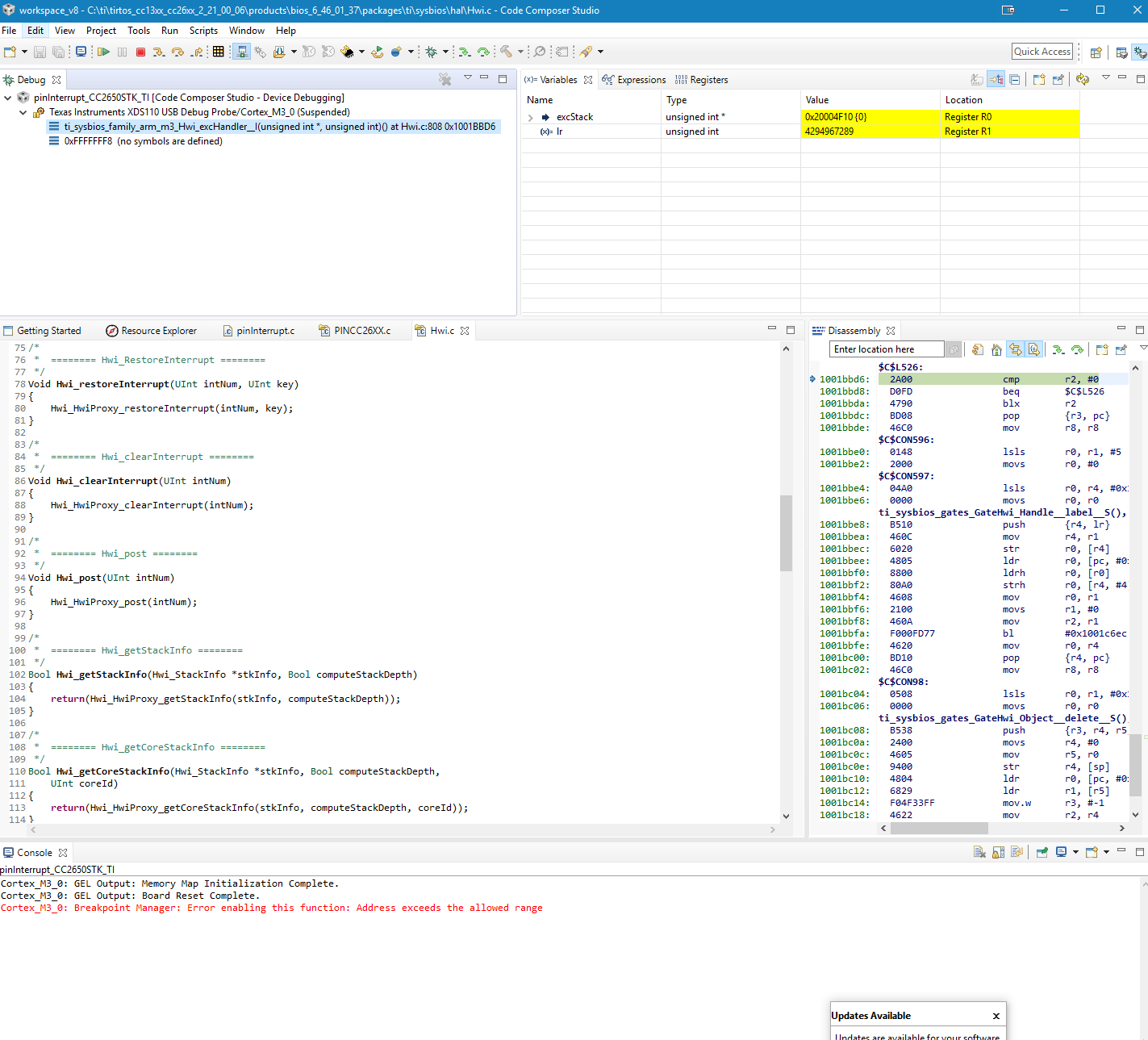
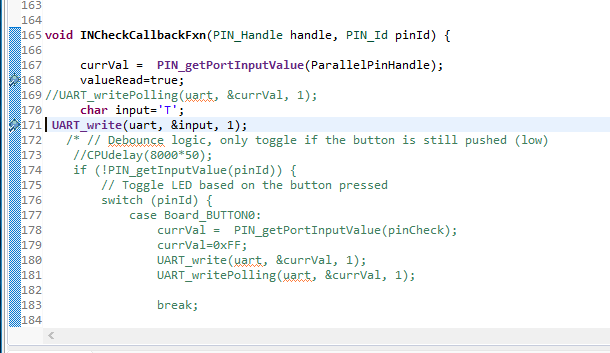
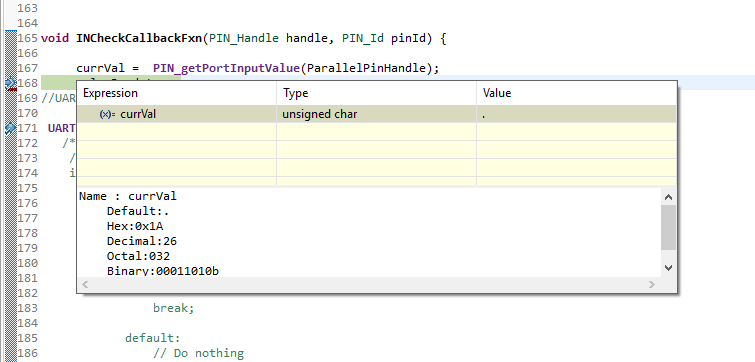
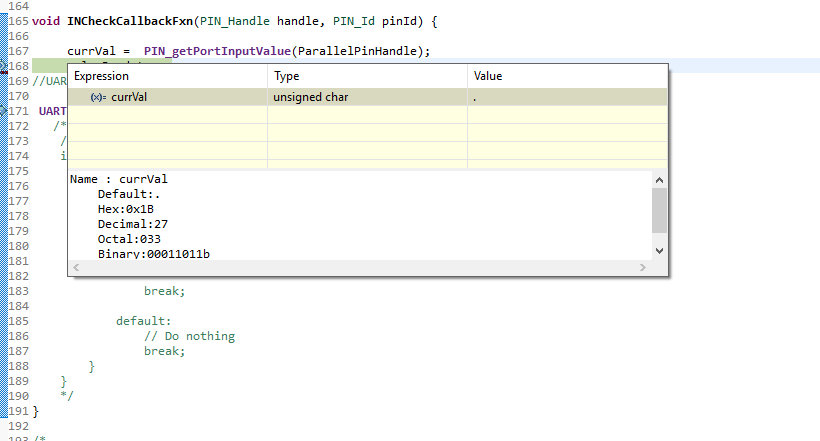
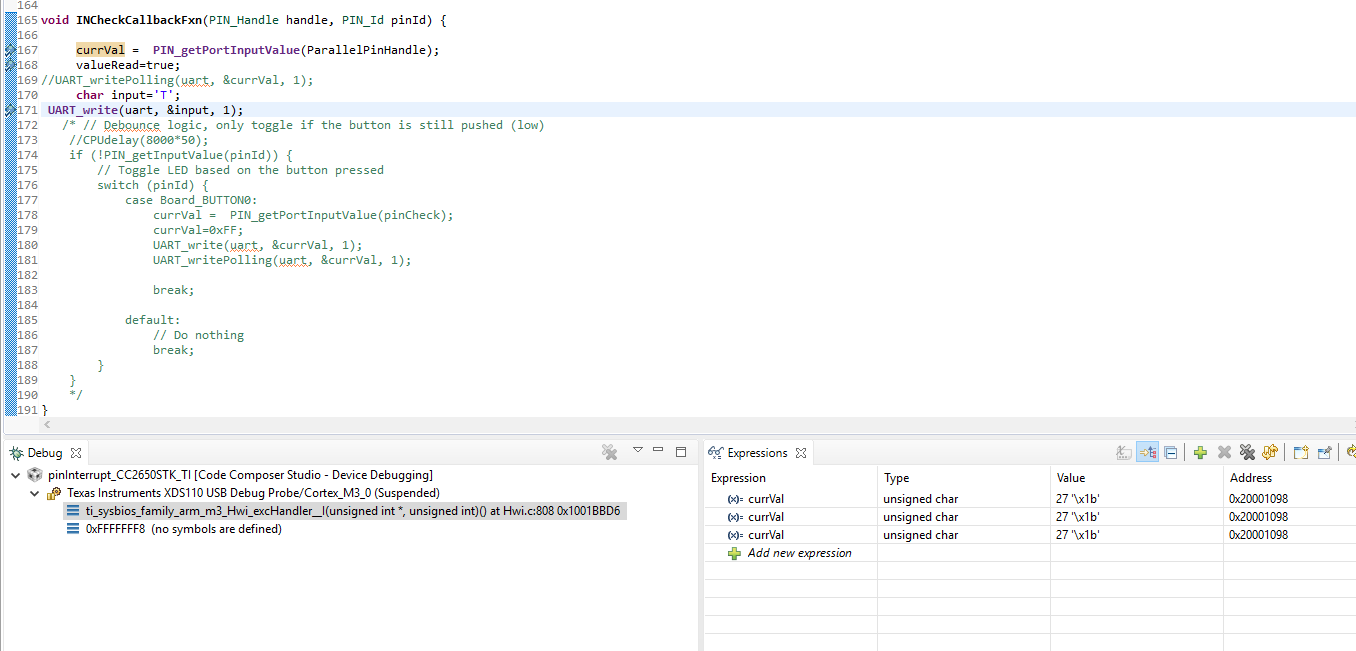
I suspect there is something wrong with your UART init, are you sure you have correct uart handle? If you set a breakpoint on the line "valueRead=true;" and check currVal, what do your see the value of currVal?
Error 1
"Can't find a source file at "/db/vtree/ademars/git_trees/avala-v/src/ti/sysbios/family/arm/m3/Hwi.c"
Locate the file or edit the source lookup path to include its location.
"
Main issue is not its firing the interrupt twice or more, Main issue is why it just send data once and then get stucks. May be system cannot handle multiple interrupt call?
Main thing I wanted to do is to read port data and write to uart. Is is possible?
Yes, that’s possible. Do you check if you get correct UART handle before you use it to output message to UART? By the way, do you call UART_Init in the beginning?
Yes I have called, somehow the issue is not happening now, Need to discuss the PIN_getPortInputValue and PIN_getPortOutputValue
It seems it read all 32 pins despite of what configuration is set on pin Handle.
Is it possible to read and write same 8 pins at two different condition?
as I explained I wanted to develop uart to parallel read/write, any idea what steps to follow?
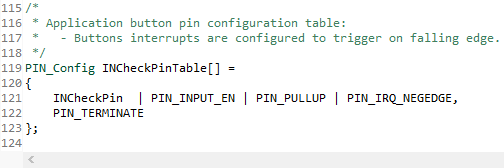
This thread has a fair number of posts and it difficult to see the current status. I understand from your last post that you have issues with PIN_getPortInputValue and PIN_getPortOutputValue. Could you share a full code that shows how you setup the pintable and how you use the functions?
You can understand by the title of the post that whats my objective.
"Read and Writing to 8 Pins Simultaneously . PIN_setPortOutputValue PIN_getPortOutputValue Example code needed."
So I need a code which can read and write 8 pin using above functions. Its hard for me understand through the documentation of TI RTOS provided.
I tried code earlier and also provided here in the forum and most of the time was spent debugging irrelevant issues.
So I think its better to ask expert here to help me with a code which can do the job.
I tested the code below based on the documentation in the PIN.h documentation:
/*
* Copyright (c) 2015-2018, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/*
* ======== empty.c ========
*/
/* For usleep() */
#include <unistd.h>
#include <stdint.h>
#include <stddef.h>
/* Driver Header files */
//#include <ti/drivers/GPIO.h>
// #include <ti/drivers/I2C.h>
// #include <ti/drivers/SPI.h>
// #include <ti/drivers/UART.h>
// #include <ti/drivers/Watchdog.h>
#include <ti/drivers/PIN.h>
#include <ti/drivers/pin/PINCC26XX.h>
/* Board Header file */
#include "Board.h"
/* Pin driver handles */
static PIN_Handle portHandle;
static PIN_State portPinState;
PIN_Config portPinTable[] = {
CC1310_LAUNCHXL_DIO12 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MAX,
CC1310_LAUNCHXL_DIO15 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MAX,
CC1310_LAUNCHXL_DIO21 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MAX,
CC1310_LAUNCHXL_DIO22 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MAX,
PIN_TERMINATE
};
/*
* ======== mainThread ========
*/
void *mainThread(void *arg0)
{
/* 1 second delay */
uint32_t time = 1;
/* Call driver init functions */
//GPIO_init();
// I2C_init();
// SPI_init();
// UART_init();
// Watchdog_init();
// Get handle to this collection of pins
portHandle = PIN_open(&portPinState, portPinTable);
PIN_setPortOutputValue(&portPinState, 0);
while (1) {
sleep(time);
//GPIO_toggle(Board_GPIO_LED0);
}
}