Hi TI Team,
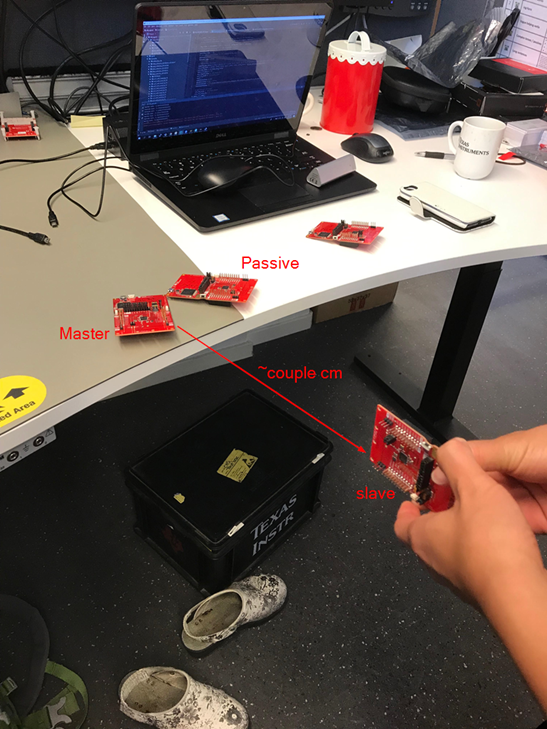
My setup is like follow: Master and passive are 30cm away from each other The slave has a distance of 1m at the start of the calibration (is this needed for the new software version?) First RTLS Monitor shows some results around +-1m. After some time we can see that the distance shown from Master and Passive are different(ca. 5m) And in the time I written down my text here, the signal goes down to -10m.How can this be possible with time of flight calculation?
Now I have the following questions:
- What is necessary to change in the setup for better performance?
- Is it necessary to have the slave in 1m distance for calibration?
- Why 3 devices?Which task has each device?
- Is it possible to do the measurement with 2 devices?
- What needs to be done for calibration? What happen? Is it possible to manually calibrate the system? If yes, how?
- Why looks the signal of master and passive different?
- What needs to be done if I don’t want to use the API and only want to use the Com-Port (helps for better understanding what will happen in background)
Thanks and best regards
Jens