Hello,
I'm trying to build a project involving Time Of Flight technique. I also use a sensor connected to the I2C Serial Port of the Launchpad, which has its own C Language API.
To do this, I need to get burst samples from slave node to master node using BLE and obtain the RSSI. I already read about this project in TI Documentation pages and they use a Python script to configure the ToF settings and to establish a connection between master and slave nodes in order to get information about RSSI and Tick values.
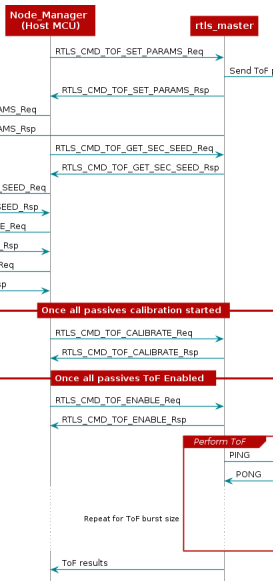
I tried to do it modifying the rtls_master project calling the Application functions shown in this sequence diagram below from the main.c file but it didn't work for me.

So, I would like to do all these things only using rtls_master and rtls_slave projects written in C and modifying them properly in order to be able to establish a connection between nodes and to be able to handle the burst stats.
Many thanks!