Other Parts Discussed in Thread: SYSCONFIG, CC2640R2F, CC2652RB
Tool/software: Code Composer Studio
I try now to compile Host_Test_CC2642R1 sdk_4_30_00_54 for a custom board.
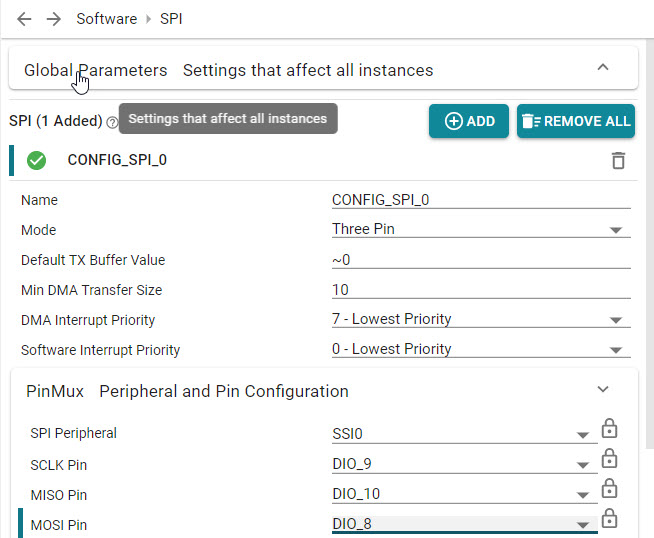
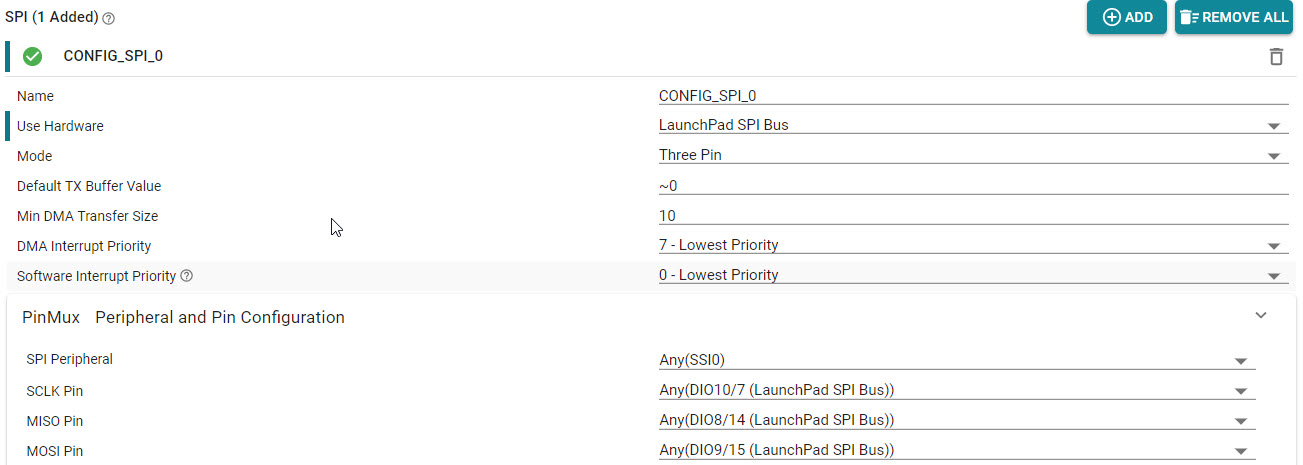
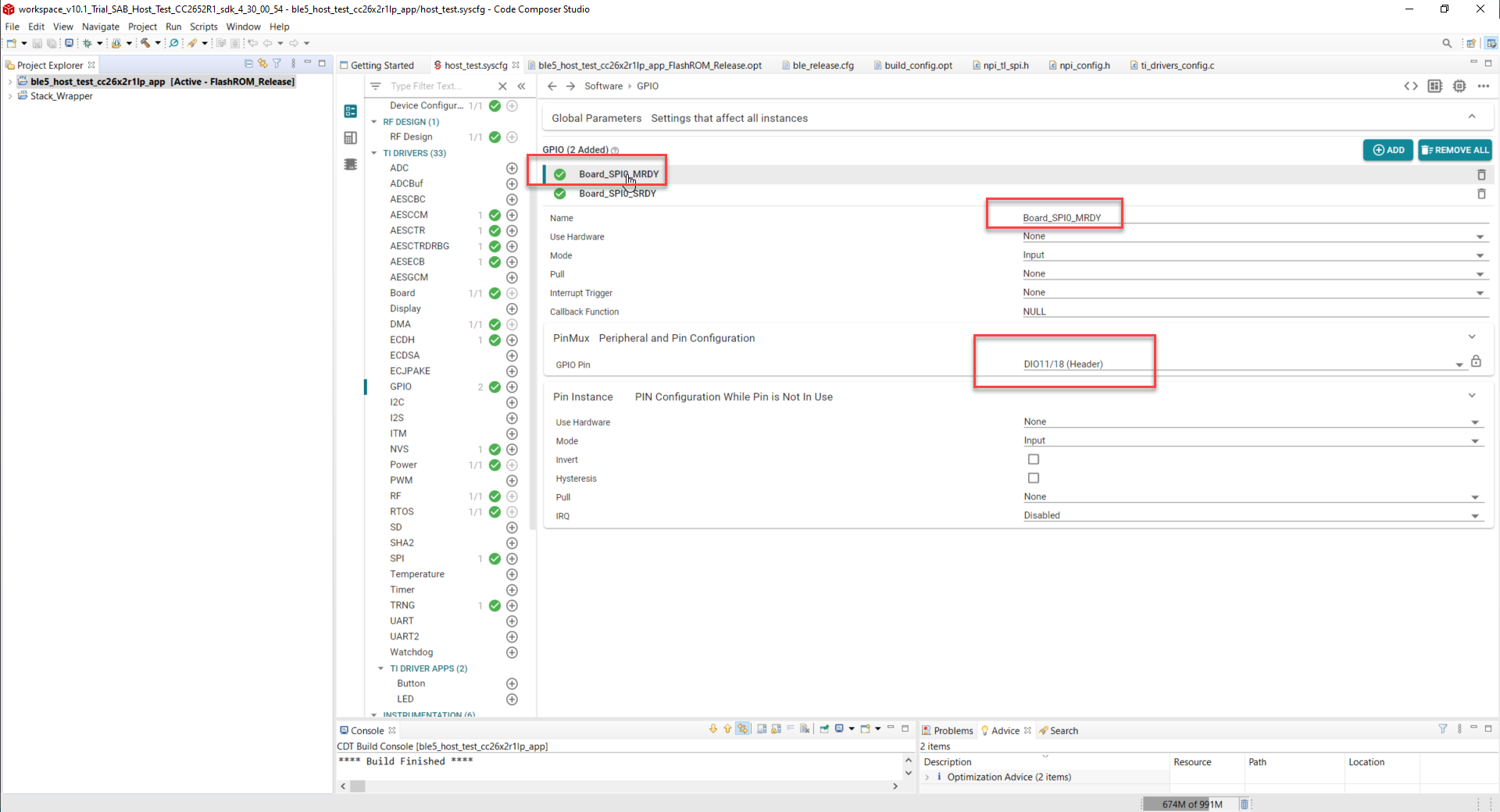
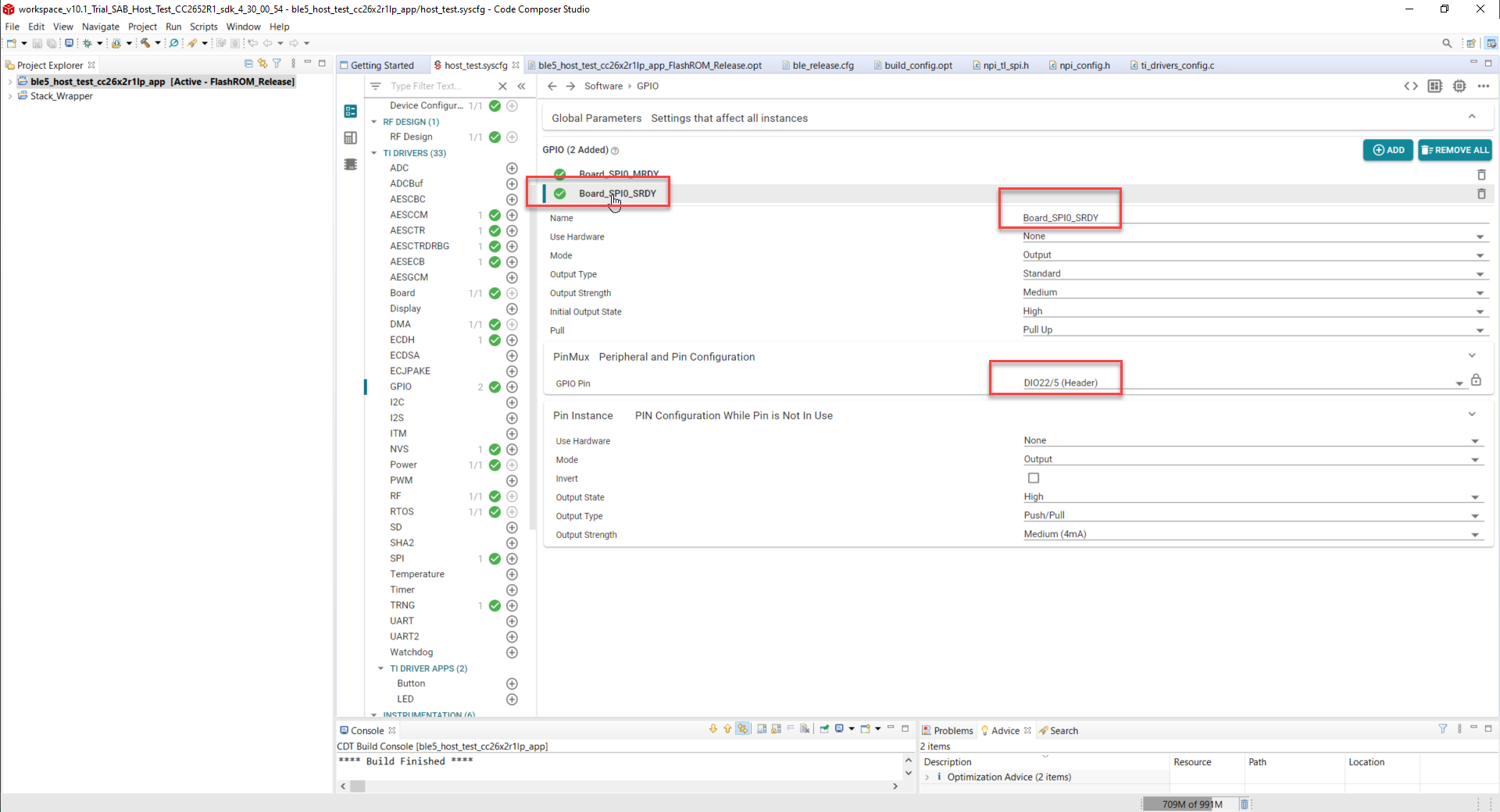
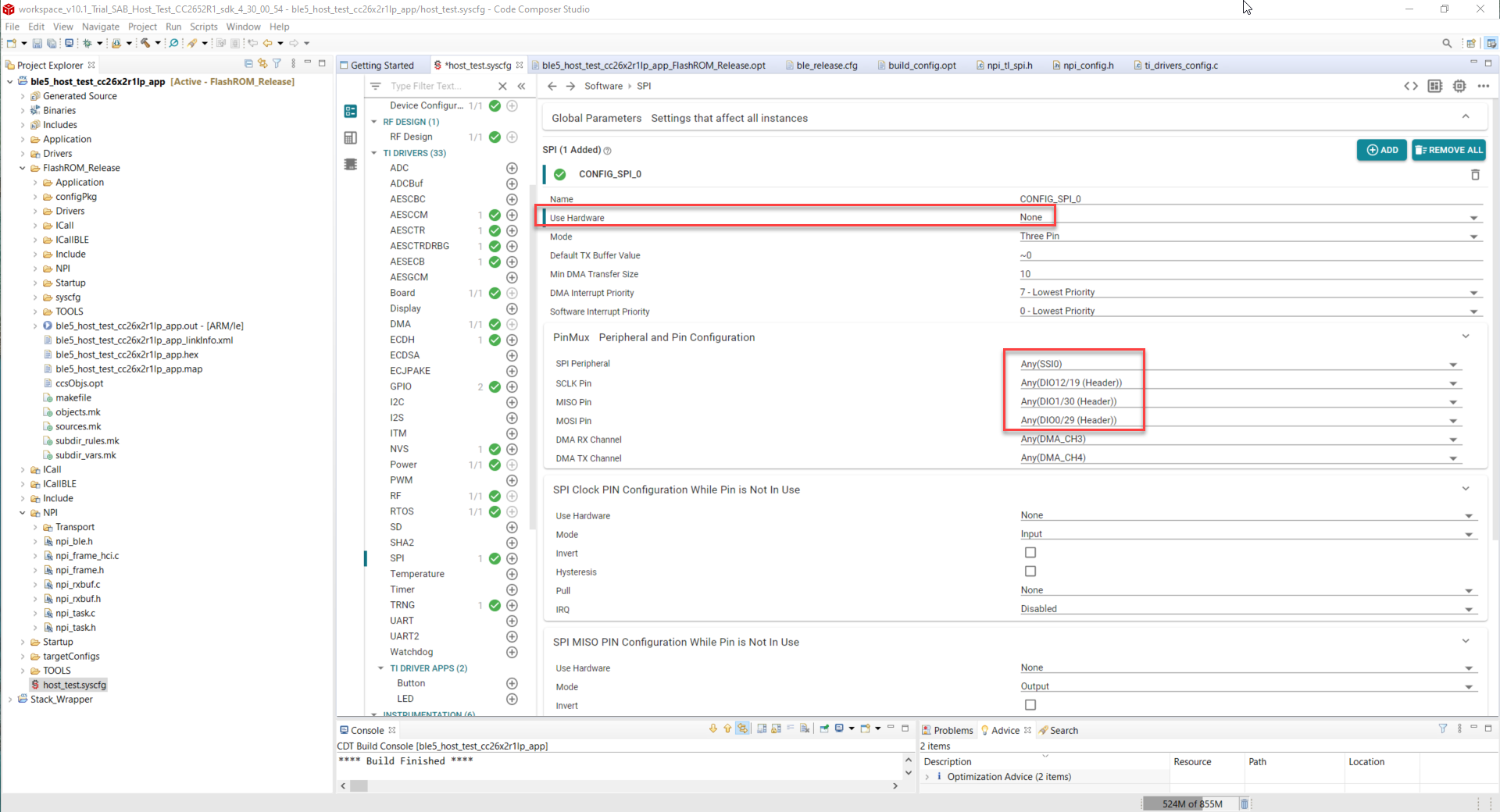
The only thing we need to change in the past (compared to launchpad) was the definition of SPI pins (I need to use SPI0 with CLK, MISO, MOSI, M2S and S2M). In rest everything was the same.
With the new host_test.syscfg I have not managed to do that because of multiple unclear settings. Besides compilation errors, I did not find out in sysconfig where to set the M2S and S2M only CLK MISO and MOSI.
What are the correct steps for what I am trying to do?
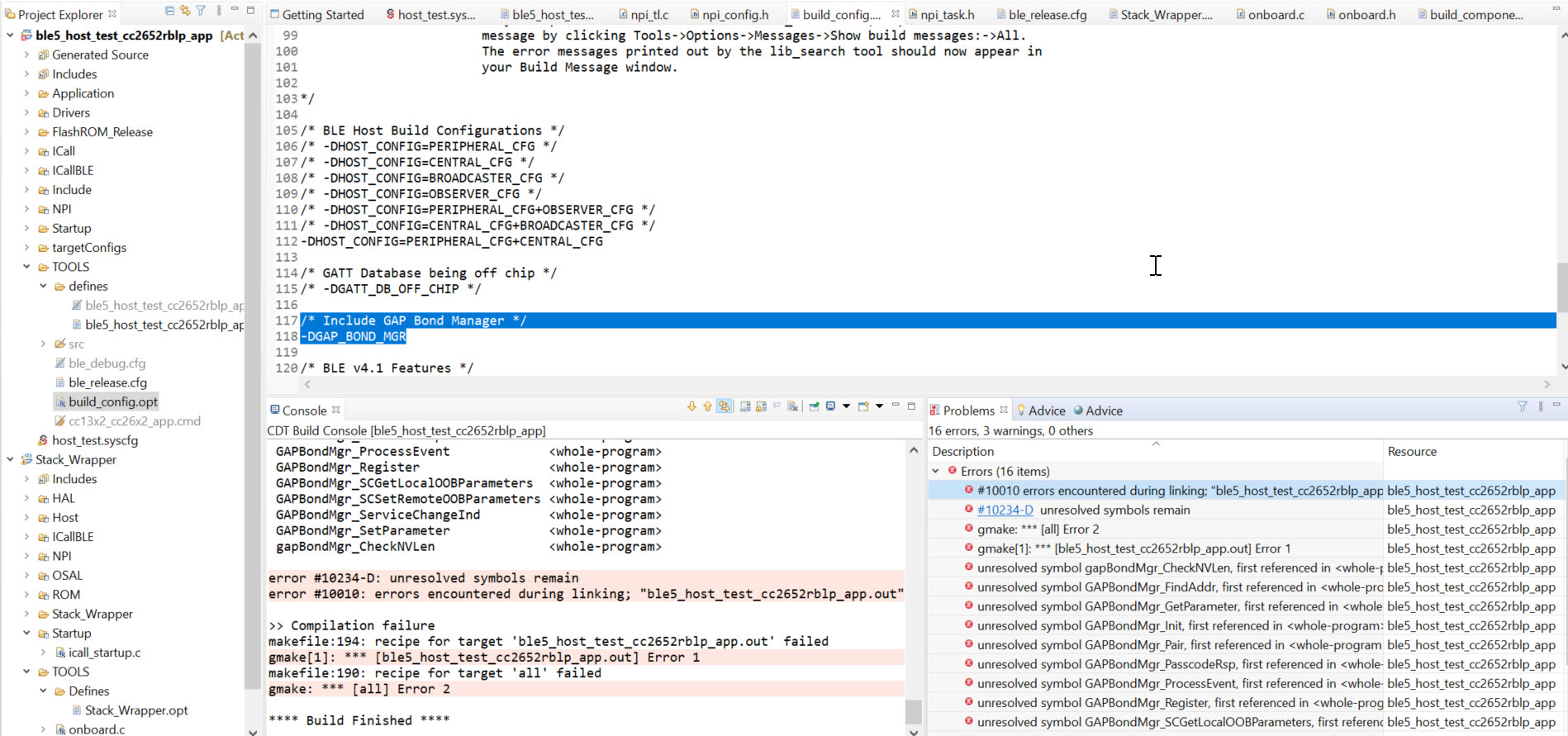
At the moment this is where I am stuck:
I import in CCS10.1.1 Host_test project from simplelink_cc13x2_26x2_sdk_4_30_00_54.
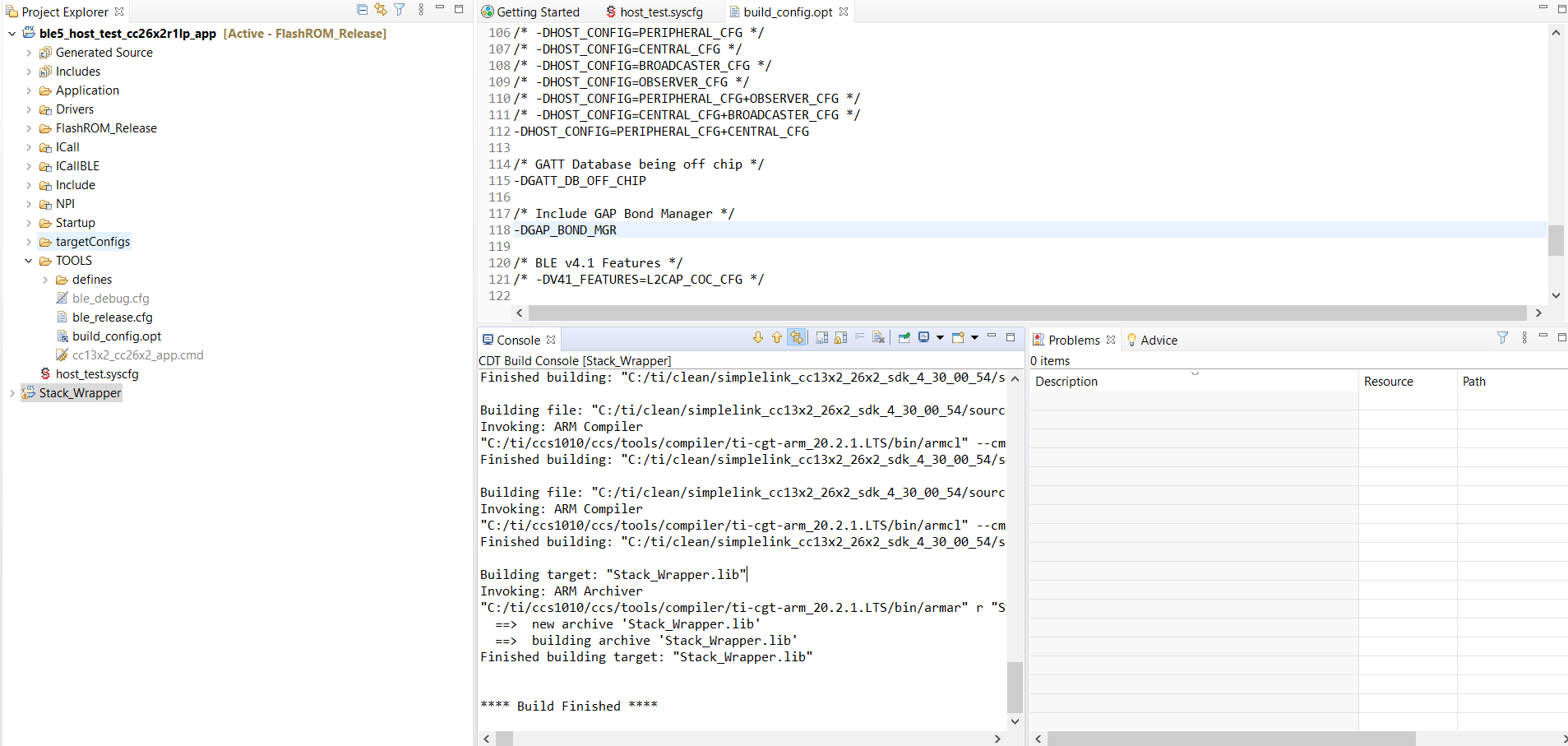
Compile ->OK
I select Use Custom Board File
Compile ->OK
I remove Display (UART is removed automatically as well) since we do not have a display
Compile failures:
#20 identifier "CONFIG_DISPLAY_UART" is undefined npi_tl_uart.c /ble5_host_test_cc26x2r1lp_app/NPI/Transport/UART line 163 C/C++ Problem
Alternatively: in the past there was the Board.h file that made use of my custom board file. Is it possible to easily use that board file in the host_test project that was created with host_test.syscfg?