Other Parts Discussed in Thread: , CC2640, UNIFLASH
I have a modified Project Zero which I have added I2C functionality to.
I am tracking down a low level code execution freeze that recently began.
The reason I suspect it is due to my I2C integration is:
- The basic code has been operational for 3 years in 1000's of devices.
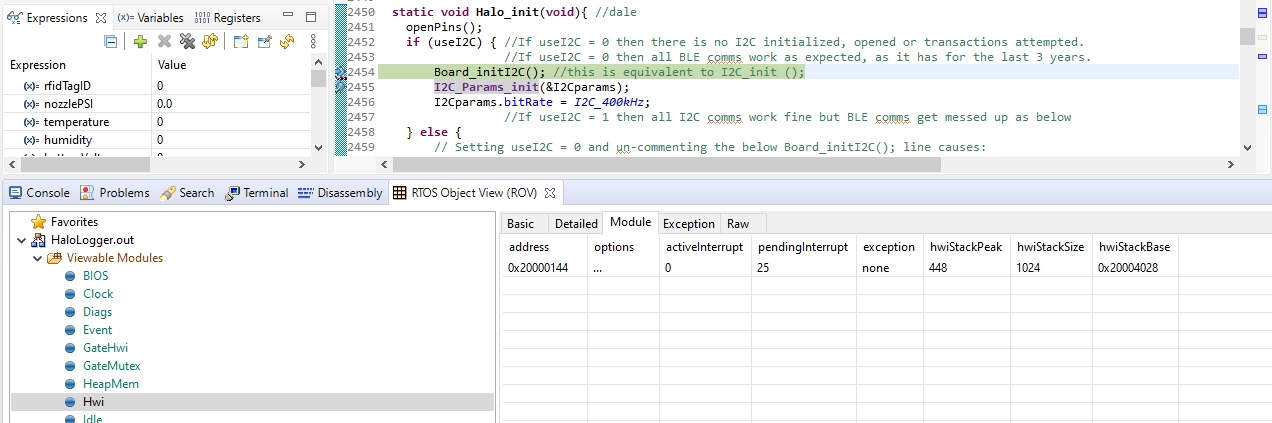
- While this code is hanging, there is power to my I2C bus. (I only do I2C communications after I use a digital input to turn on the I2C bus power line and immediately turn the I2C bus power off after I am done that particular I2C com event. I only do I2C com events every 5 seconds for a few milliseconds).
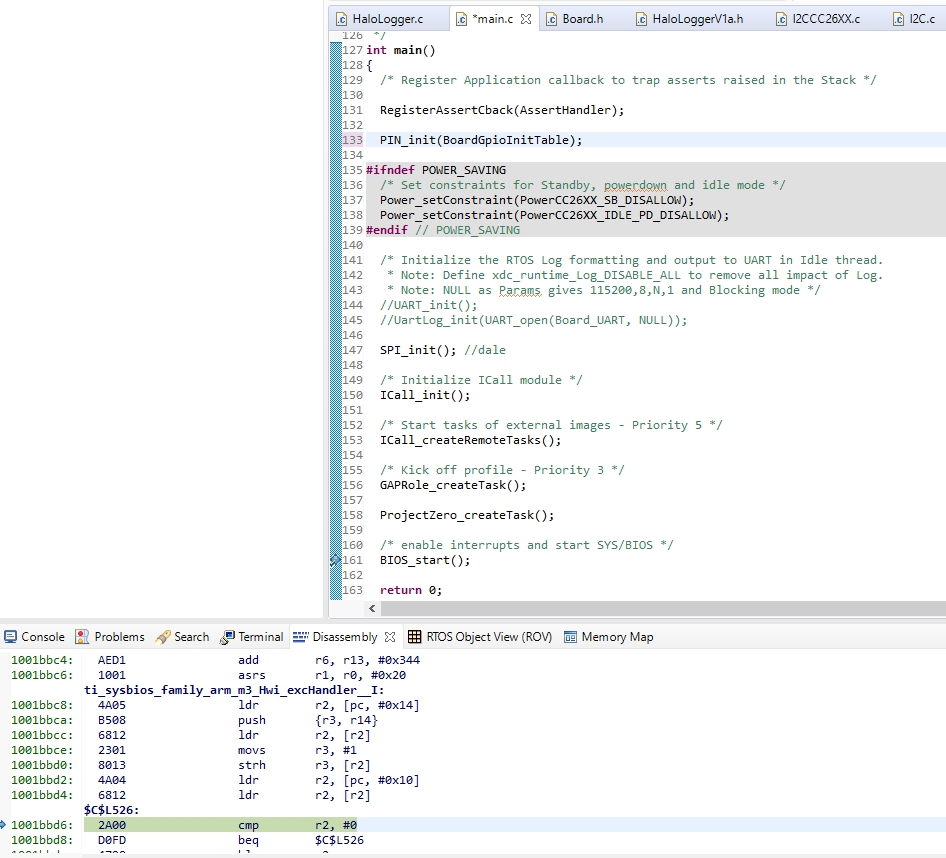
Here is the assembly code where there is an infinite loop executing between two lines of code:

Does anyone have any idea what might be causing this freeze?
I suspect that some of my blocking mode I2C communications are taking too much time being run from the main application loop. Is that a possibility?
Is there example code as to how to use I2C in callback mode with a BLE stack (I can not seem to find any)?
Thanks,
Dale