


Hello,
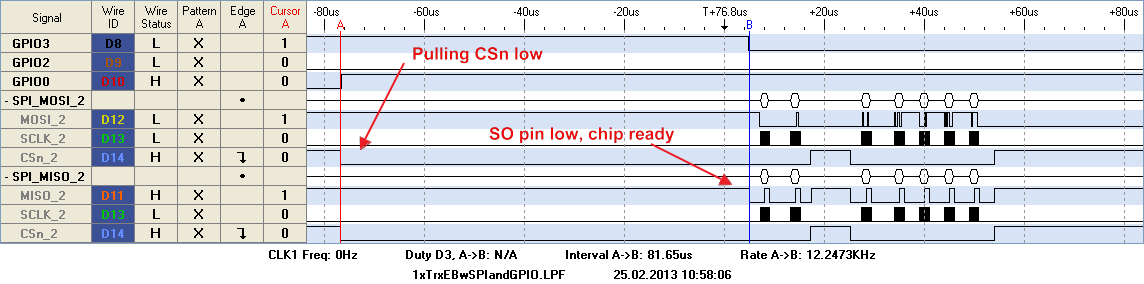
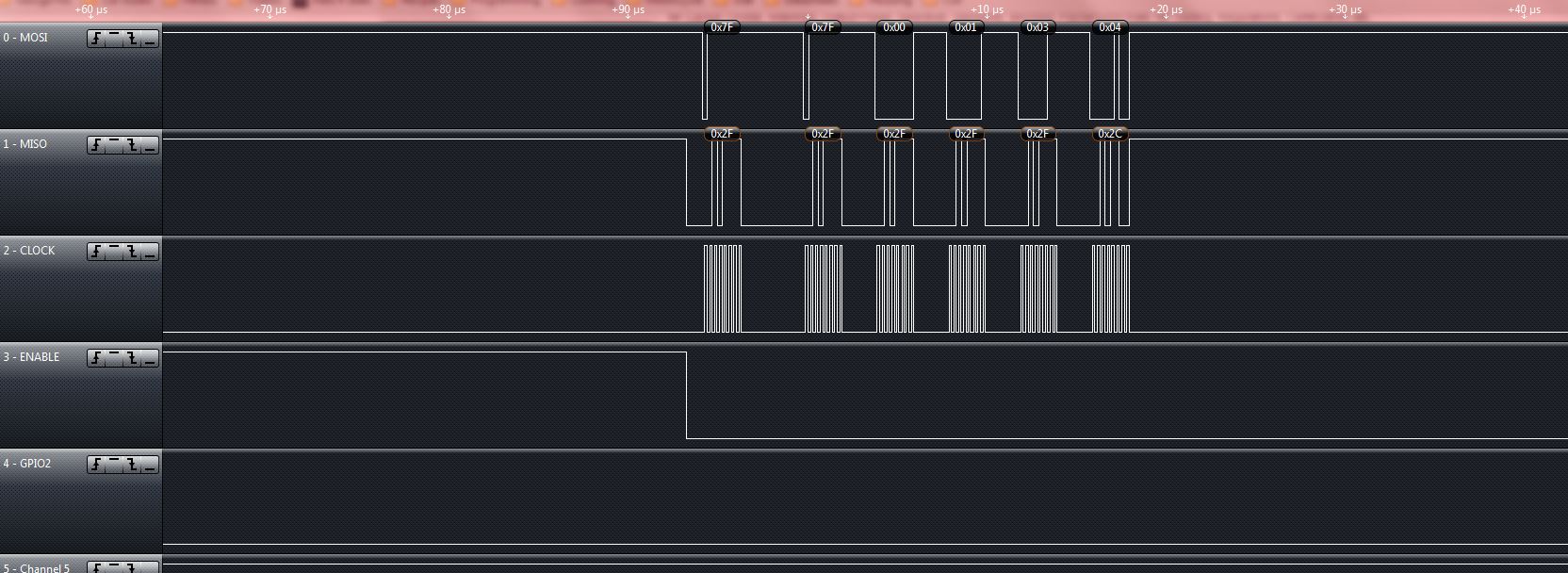
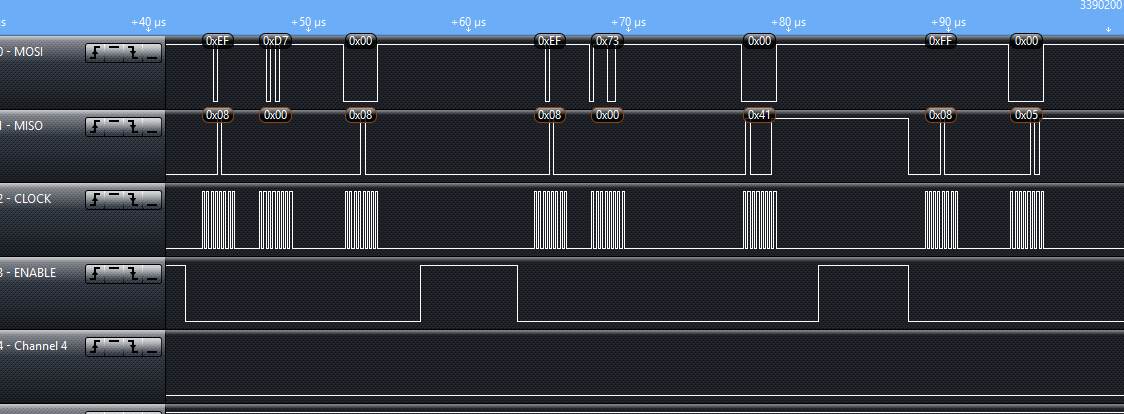
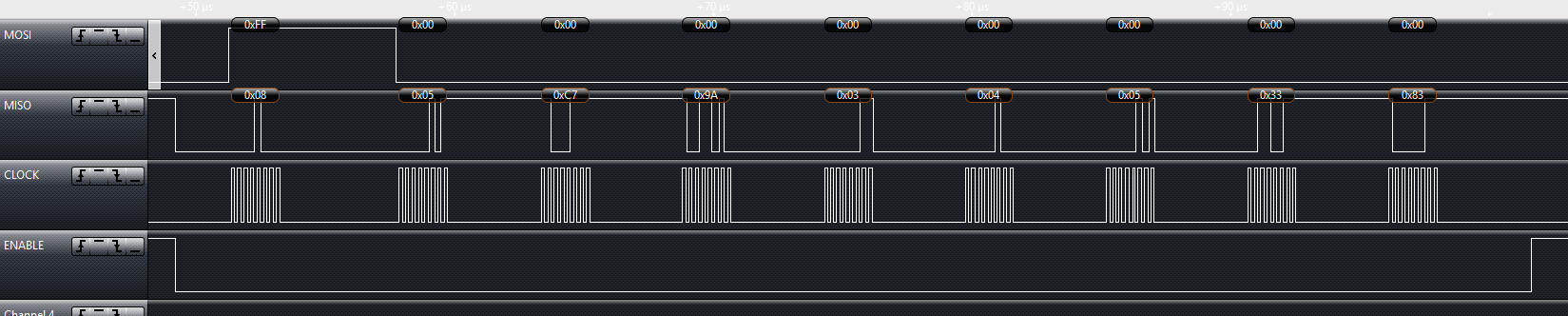
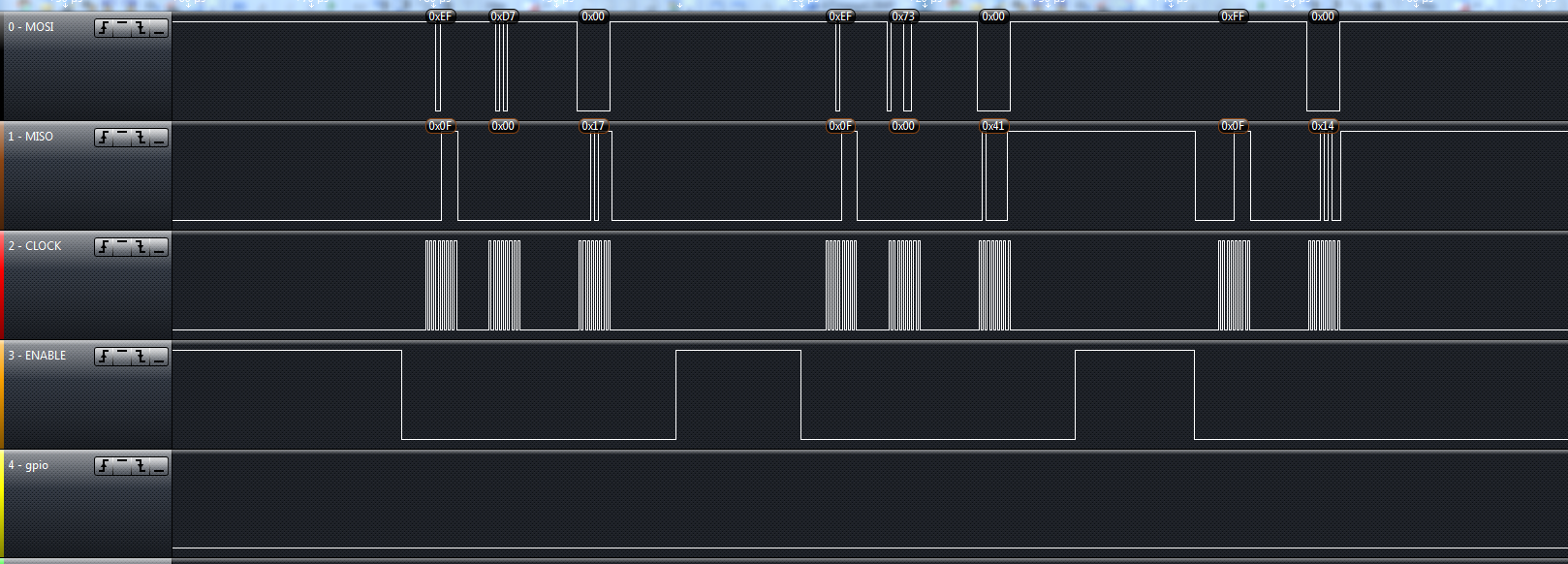
I'm trying to connect my own MCU to the CC1125 via its evaluation board. I believe that I have everything wired together properly. What I need help with is some of the SPI stuff. I ran the cc112x_easy_link software with the evaluation boards MPS430 mcu and I used a logic analyzer on the SPI bus, then I wrote the software for my MCU and ran it on the SPI bus and compared the two. My timing diagram is nearly identical, however I'm getting different status values back from the CC1125. I'm seeing that the mps430 gets back a status byte of 0x7F for each write command. Mine however is getting decremented values that stay between 0x7F and 0x70, cycling over and over again. (I've attached images for reference).
What status values should I be getting? 0x7F?


{kind=link}