Hi,
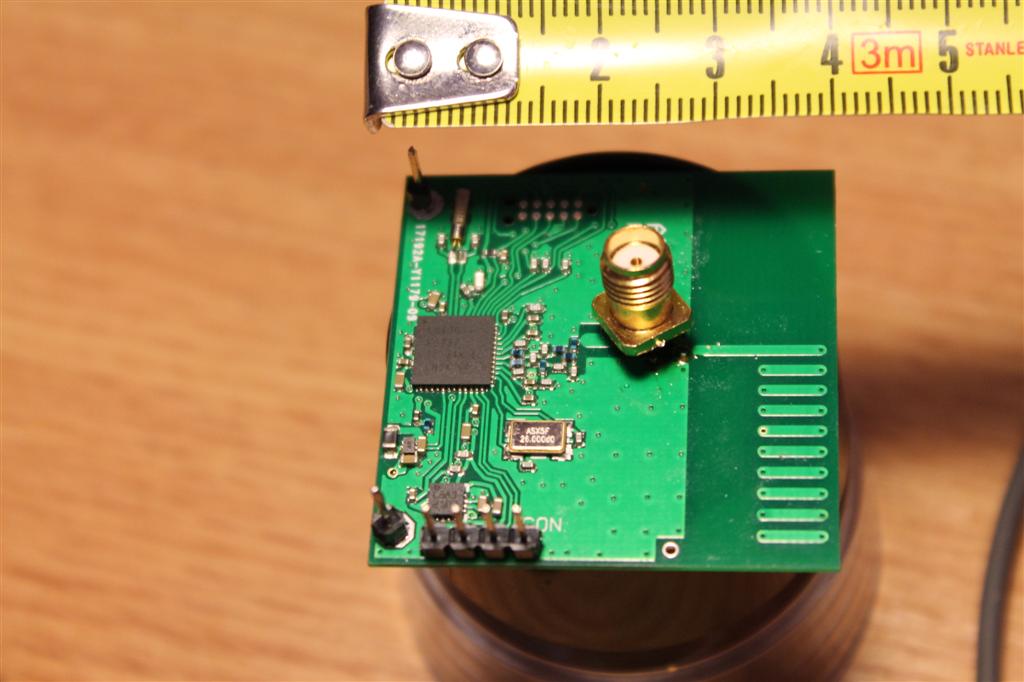
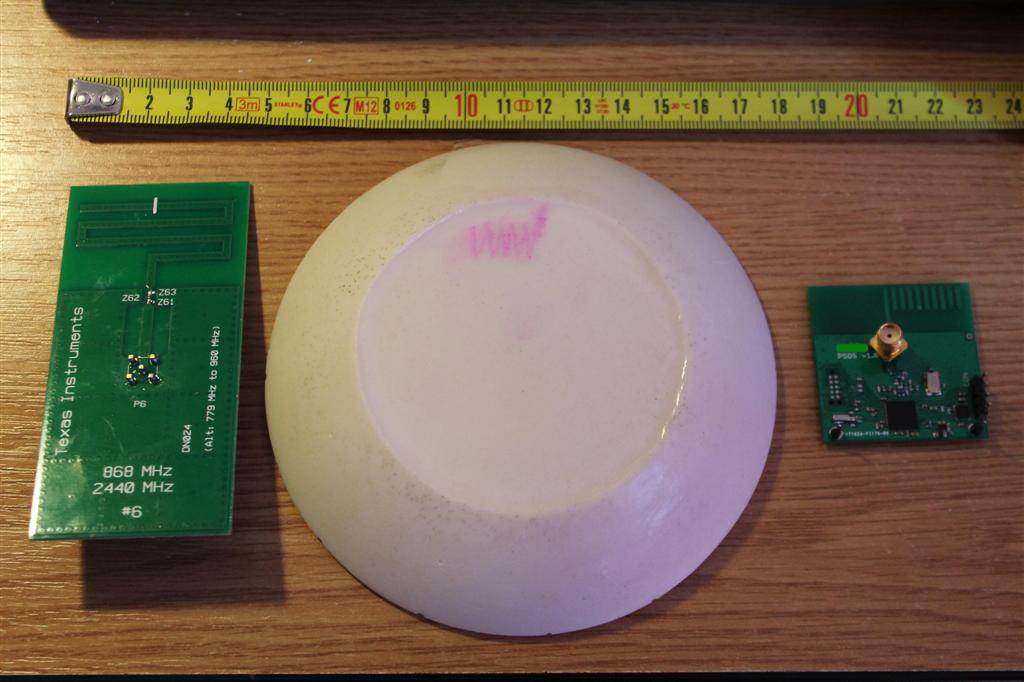
I asembled my first board using cc430f5137 and I'm testing it using smartRF studio and another board from TI (EM430). At 38 kbps the RSSI is -38dbi and the packet error rate is 64%, quite high. what could be the cause of the high Per? If i do the same test with two Em430 boards the PER is almost 0 so, I dont' supect external noise to be the cause. I'm not experienced at all in RF tunning.
Thanks