Part Number: LP-EM-CC1354P10
Other Parts Discussed in Thread: SYSCONFIG
Tool/software:
Hi,
I am using ns_coap_node example and I'd like to implement an UART interruption so the node can process some data received and send it to border router using CoAP. I have tried implementing modifying the original code with the following steps:
Added UART peripheral in Sysconfig: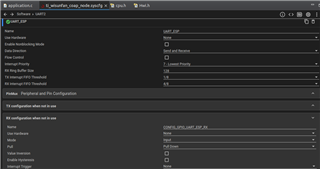
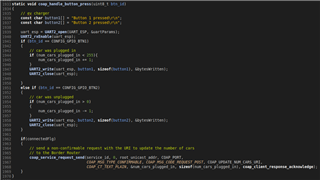
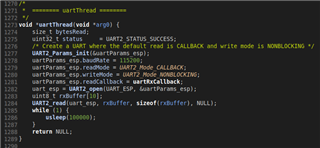
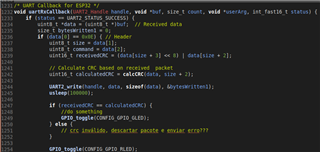
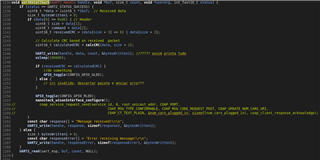
Implemented callback function in application.c: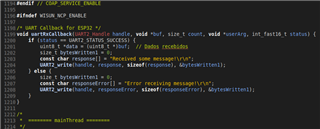
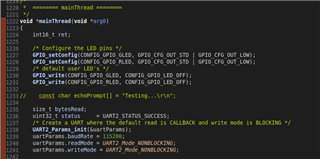
Initialized UART in mainThread in application.c: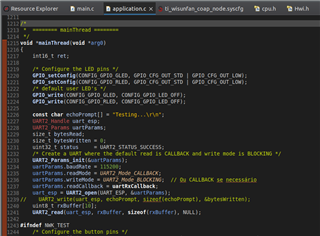
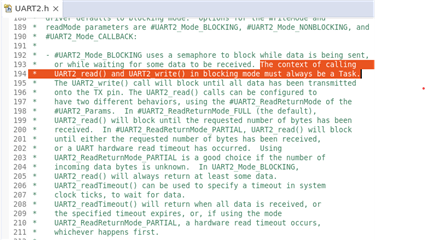
When I debug the code, while there is nothing received in the UART peripheral it keeps running as expected. When I write something to UART and then suspend the running project, I can see that it is stuck in this while(1) loop: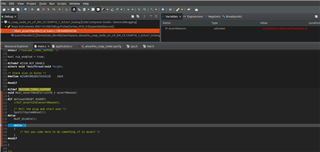
Is this what it was supposed to happen? I thought that it would go to the UART callback function and then keep running as usual.
Regards,
Eduardo.