Hello,
I just started on developing on the CC1352P1 kits and ran into a problem when executing the RF_runCmd in a button callback.
My starting point was the rfPacketTx example project (with TI-RTOS) where I simply copied the code for transmitting a packet into a button callback (I use the button driver app) and changed the frequency to 2.4 GHz. The RF_runCmd seems to execute well with the RF_EventLasCmdDone event and the PROP_DONE_OK command status and also my RX board receives the packet (indicated by the toggling LED). After this, the green LED is toggled, the radio is powered down and the core is set to sleep for 500 ms (these are all part of the rfPacketTx example code,).
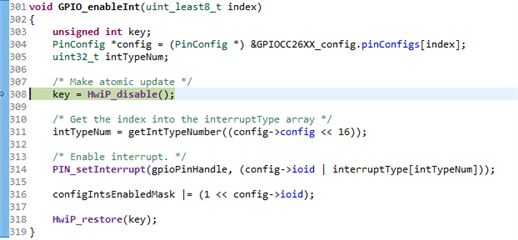
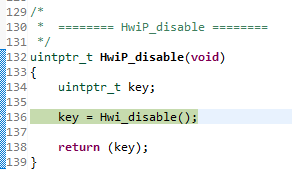
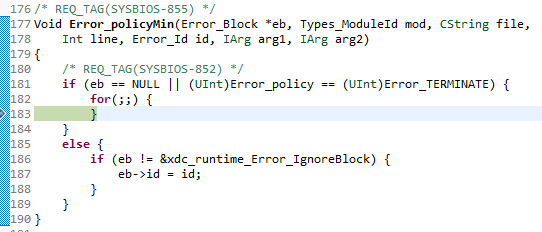
After executing the button callback (including LED toggling, radio power down and sleep), the code runs into the GPIO_enableInt function but seems to fail when disabling the HWI (on HwiP_disable()). It then runs into the infinte loop of Error_policyMin().
Below you'll find the callstack.

And for further reference, here's my mainThread, (where I cut out seemingly unnecessary parts):
void *mainThread(void *arg0)
{
RF_Params rfParams;
RF_Params_init(&rfParams);
/* Open LED pins */
ledPinHandle = PIN_open(&ledPinState, pinTable);
if (ledPinHandle == NULL)
{
while(1);
}
Button_Params buttonParams;
Button_init();
logging_init(logLvlDebugLvl1);
/* Open button 1 and button 2 */
Button_Params_init(&buttonParams);
buttonHandle[CONFIG_BUTTON_0] = Button_open(CONFIG_BUTTON_0,
handleButtonCallback,
&buttonParams);
buttonHandle[CONFIG_BUTTON_1] = Button_open(CONFIG_BUTTON_1,
handleButtonCallback,
&buttonParams);
/* Check if the button open is successful */
if((buttonHandle[CONFIG_BUTTON_1] == NULL) ||
(buttonHandle[CONFIG_BUTTON_0] == NULL))
{
while(1);
}
/* Create ring buffer to store button events */
RingBuf_construct(&ringObj, eventBuf, EVENTBUFSIZE);
RF_cmdPropTx_2msk250kbps_1.pktLen = PAYLOAD_LENGTH;
RF_cmdPropTx_2msk250kbps_1.pPkt = packet;
RF_cmdPropTx_2msk250kbps_1.startTrigger.triggerType = TRIG_NOW;
/* Request access to the radio */
#if defined(DeviceFamily_CC26X0R2)
rfHandle = RF_open(&rfObject, &RF_prop, (RF_RadioSetup*)&RF_cmdPropRadioSetup, &rfParams);
#else
rfHandle = RF_open(&rfObject, &RF_prop_2msk250kbps_1, (RF_RadioSetup*)&RF_cmdPropRadioDivSetup_2msk250kbps_1, &rfParams);
#endif// DeviceFamily_CC26X0R2
/* Set the frequency */
RF_postCmd(rfHandle, (RF_Op*)&RF_cmdFs_2msk250kbps_1, RF_PriorityNormal, NULL, 0);
log_message(logMsgTypeInfo, "Frequency set to %d MHz", RF_cmdFs_2msk250kbps_1.frequency);
RF_EventMask terminationReason = RF_runCmd(rfHandle, (RF_Op*)&RF_cmdPropTx_2msk250kbps_1,
RF_PriorityNormal, NULL, 0);
switch(terminationReason)
{
case RF_EventLastCmdDone:
// A stand-alone radio operation command or the last radio
// operation command in a chain finished.
log_message(logMsgTypeDebugLvl1, "RF_runCmd return value: RF_EventLastCmdDone");
break;
.
.
.
default:
// Uncaught error event
while(1);
}
uint32_t cmdStatus = ((volatile RF_Op*)&RF_cmdPropTx_2msk250kbps_1)->status;
switch(cmdStatus)
{
case PROP_DONE_OK:
// Packet transmitted successfully
break;
.
.
.
default:
// Uncaught error event - these could come from the
// pool of states defined in rf_mailbox.h
while(1);
}
while(1)
{
}
}
void handleButtonCallback(Button_Handle handle, Button_EventMask events)
{
if(Button_EV_CLICKED == (events & Button_EV_CLICKED))
{
PIN_setOutputValue(ledPinHandle, CONFIG_PIN_GLED,!PIN_getOutputValue(CONFIG_PIN_GLED));
/* Create packet with incrementing sequence number and random payload */
packet[0] = (uint8_t)(seqNumber >> 8);
packet[1] = (uint8_t)(seqNumber++);
uint8_t i;
for (i = 2; i < PAYLOAD_LENGTH; i++)
{
packet[i] = rand();
}
/* Send packet */
RF_EventMask terminationReason = RF_runCmd(rfHandle, (RF_Op*)&RF_cmdPropTx_2msk250kbps_1,
RF_PriorityNormal, NULL, 0);
switch(terminationReason)
{
case RF_EventLastCmdDone:
// A stand-alone radio operation command or the last radio
// operation command in a chain finished.
break;
.
.
.
default:
// Uncaught error event
while(1);
}
uint32_t cmdStatus = ((volatile RF_Op*)&RF_cmdPropTx_2msk250kbps_1)->status;
switch(cmdStatus)
{
case PROP_DONE_OK:
// Packet transmitted successfully
break;
.
.
.
default:
// Uncaught error event - these could come from the
// pool of states defined in rf_mailbox.h
while(1);
}
#ifndef POWER_MEASUREMENT
PIN_setOutputValue(ledPinHandle, CONFIG_PIN_GLED,!PIN_getOutputValue(CONFIG_PIN_GLED));
#endif
/* Power down the radio */
RF_yield(rfHandle);
#ifdef POWER_MEASUREMENT
/* Sleep for PACKET_INTERVAL s */
sleep(PACKET_INTERVAL);
#else
/* Sleep for PACKET_INTERVAL us */
usleep(PACKET_INTERVAL);
#endif
}
Any help would be appreciated. If you need further detail, please let me know. Thank you in advance.
Sincerely,
Alex