Part Number: CC1312R
Other Parts Discussed in Thread: SYSBIOS
Tool/software:
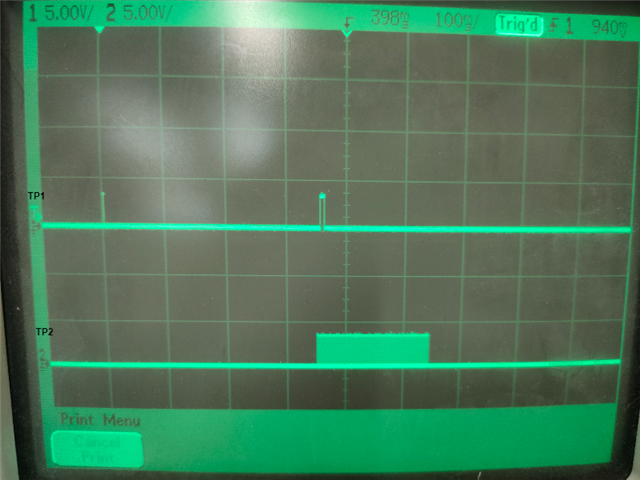
After returning from standby mode, the RF, timer, UART, etc. are initialized and packets are sent. After the initialization, it takes about 30 ms for the timer interrupt to occur. Is this due to the oscillator stabilization time? Also, is there a way to shorten this time?