Tool/software:
Hi,
I am trying to port our code from 15.4 FH mode to FH Low Latency Broadcast (FH-LLB) mode. So far I was able to get network joining, sending data from sensor to collector to work, but hit a snag when trying to send data from collector to a specific sensor node.
According to the documentation available here, collector sends data to sensor through broadcast, each sensor node receives a copy of the message and discards messages without matching address. Programming wise, how do we go about this?
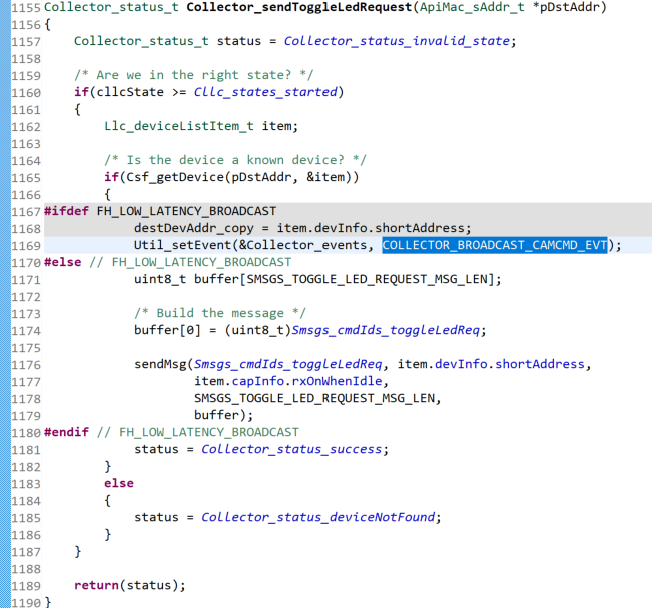
I assume we can use the same function in `collector.c` as we do in other network modes
// collector.c
static bool sendMsg(Smsgs_cmdIds_t type, uint16_t dstShortAddr, bool rxOnIdle,
uint16_t len,
uint8_t *pData,
uint8_t *frameIdPtr);
So far none of the messages sent via this function is received by sensor nodes.
There is also a function to broadcast messages:
static void sendBroadcastMsg(Smsgs_cmdIds_t type, uint16_t len,
uint8_t *pData)
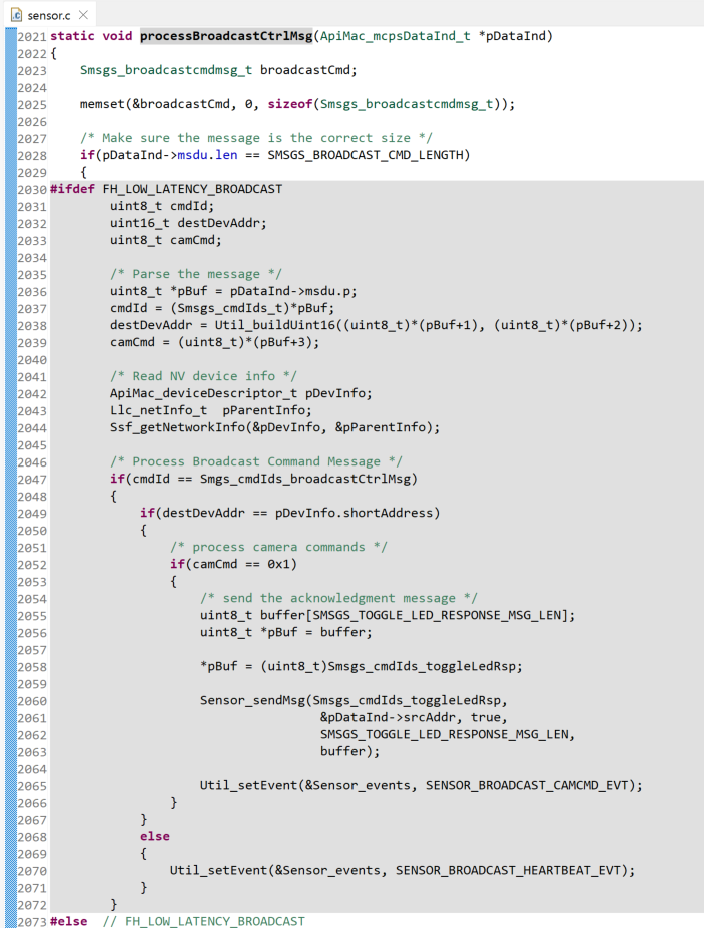
This seems to be the function used by example collector project to send data to sensor nodes in FH-LLB mode. Destination address is manually assembled into payload, sensor nodes then perform a manual check if destination address matches its own.
/*
Collector generate a broadcast command message for FH mode
*/
if(Collector_events & COLLECTOR_BROADCAST_TIMEOUT_EVT)
{
/* Clear the event */
Util_clearEvent(&Collector_events, COLLECTOR_BROADCAST_TIMEOUT_EVT);
if(FH_BROADCAST_INTERVAL > 0 && (!CERTIFICATION_TEST_MODE))
{
#ifdef FH_LOW_LATENCY_BROADCAST
if(broadcastQueue < 1)
{
uint8_t buffer[SMSGS_BROADCAST_CMD_LENGTH];
uint8_t *pBuf = buffer;
/* Build the message */
if(sendCamCmd)
{
*pBuf++ = (uint8_t)Smgs_cmdIds_broadcastCtrlMsg;
*pBuf++ = Util_loUint16(destDevAddr);
*pBuf++ = Util_hiUint16(destDevAddr);
*pBuf = 0x1;
sendCamCmd -= 1;
}
else
{
*pBuf++ = (uint8_t)Smgs_cmdIds_broadcastCtrlMsg;
*pBuf++ = 0xF;
*pBuf++ = 0xF;
*pBuf = 0xF;
}
broadcastQueue += 1;
sendBroadcastMsg(Smgs_cmdIds_broadcastCtrlMsg, SMSGS_BROADCAST_CMD_LENGTH,
buffer);
}
/* set clock for next broadcast command */
Csf_setBroadcastClock(FH_BROADCAST_INTERVAL / 2);
#else // FH_LOW_LATENCY_BROADCAST
generateBroadcastCmd();
/* set clock for next broadcast command */
Csf_setBroadcastClock(FH_BROADCAST_INTERVAL);
#endif // FH_LOW_LATENCY_BROADCAST
}
}
My question is, can the address check done by MAC layer? Or is there a different way to do it?
Thanks,
ZL