Hi,
I'm trying to setup and read the temperature digitally from the CC1200 unit according to the document "DN403_B - CC112X/CC120X On-Chip Temperature Sensor - SWRA415B - Sept 2013".
I've tryed to follow the example code at the end of the document with no success.
Here are my questions
1- The register 'FREQ_IF_CFG' in table 3 (page 6) does not exist. Do you mean 'CC120X_IF_MIX_CFG'?
2- CC120X_ATEST_MODE is set to 0x07 (same val as CC120X_GBIAS1). Is this a typo? The analog set up sets this register to 0x0C...
3- Reading CC112X_MARCSTATE register gives 0x6D before entering debug mode and 0x41 after. Is this ok - no information about correct MARC state is given?
4 - The document does not say anyting about how to use the CHFILT_Ix and CHFILT_Qx registers to get the 'Digital readout'-value to use in eq (7) page 6- Some help here is REEAAALLLY appreciated.... Are they some kind of real and imaginary parts (see my next question)? and how am I supposed to use them?
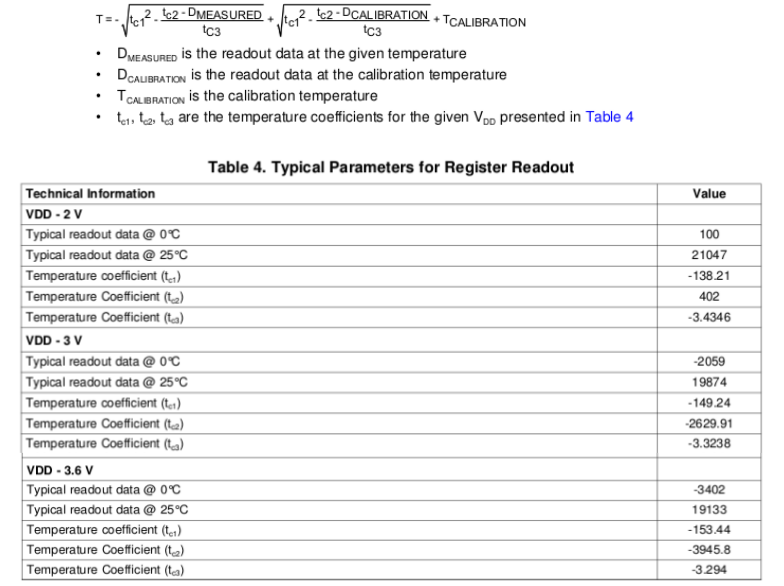
5- If you try to solve the second order equation (7) in page 6 with the coefficients in table 4 on the same page there are no real solutions for digital readings above 17800 (the decriment delta is negative)... wich is below 25oC...
I really appreciate some help

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.