Hello
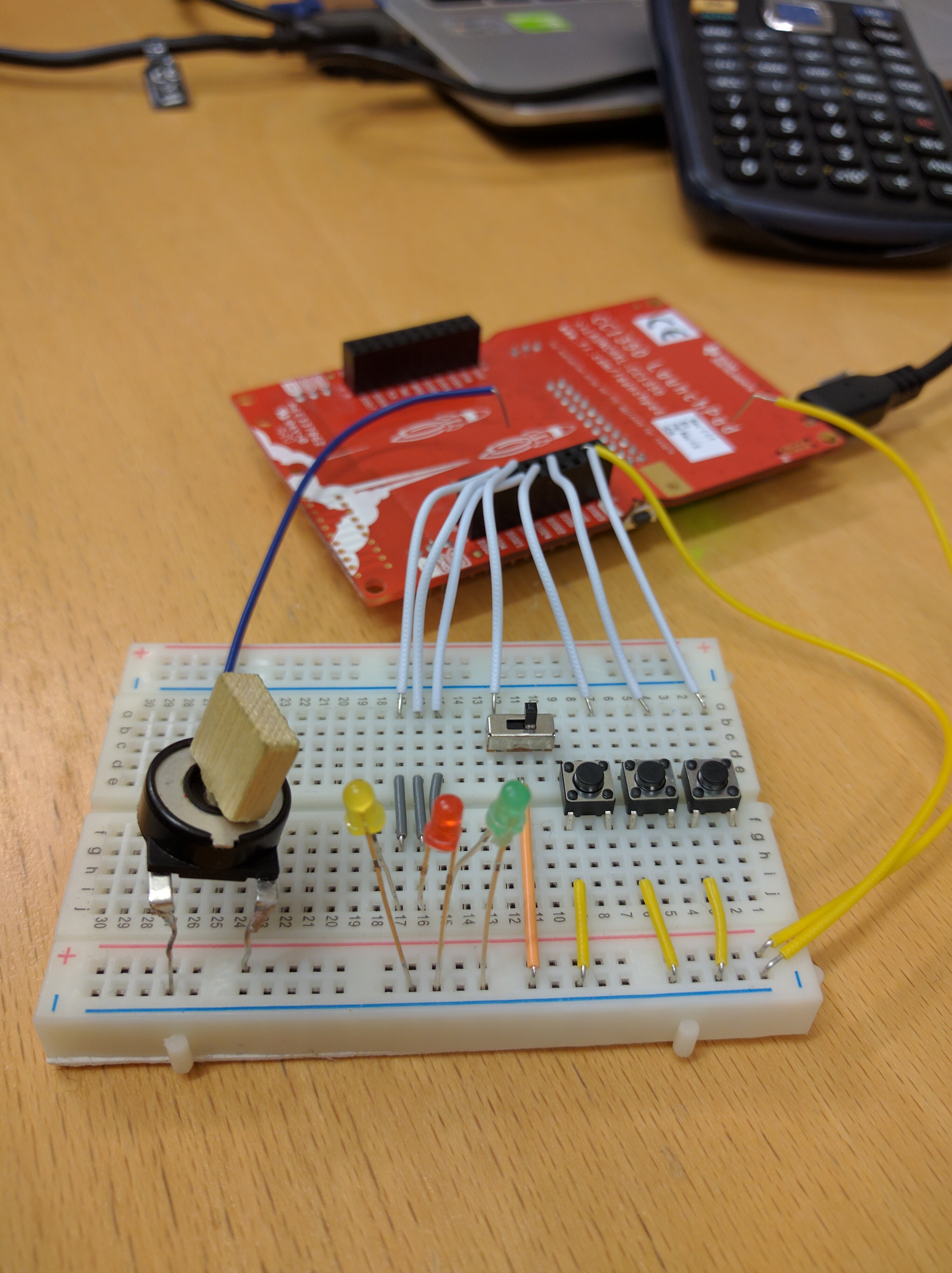
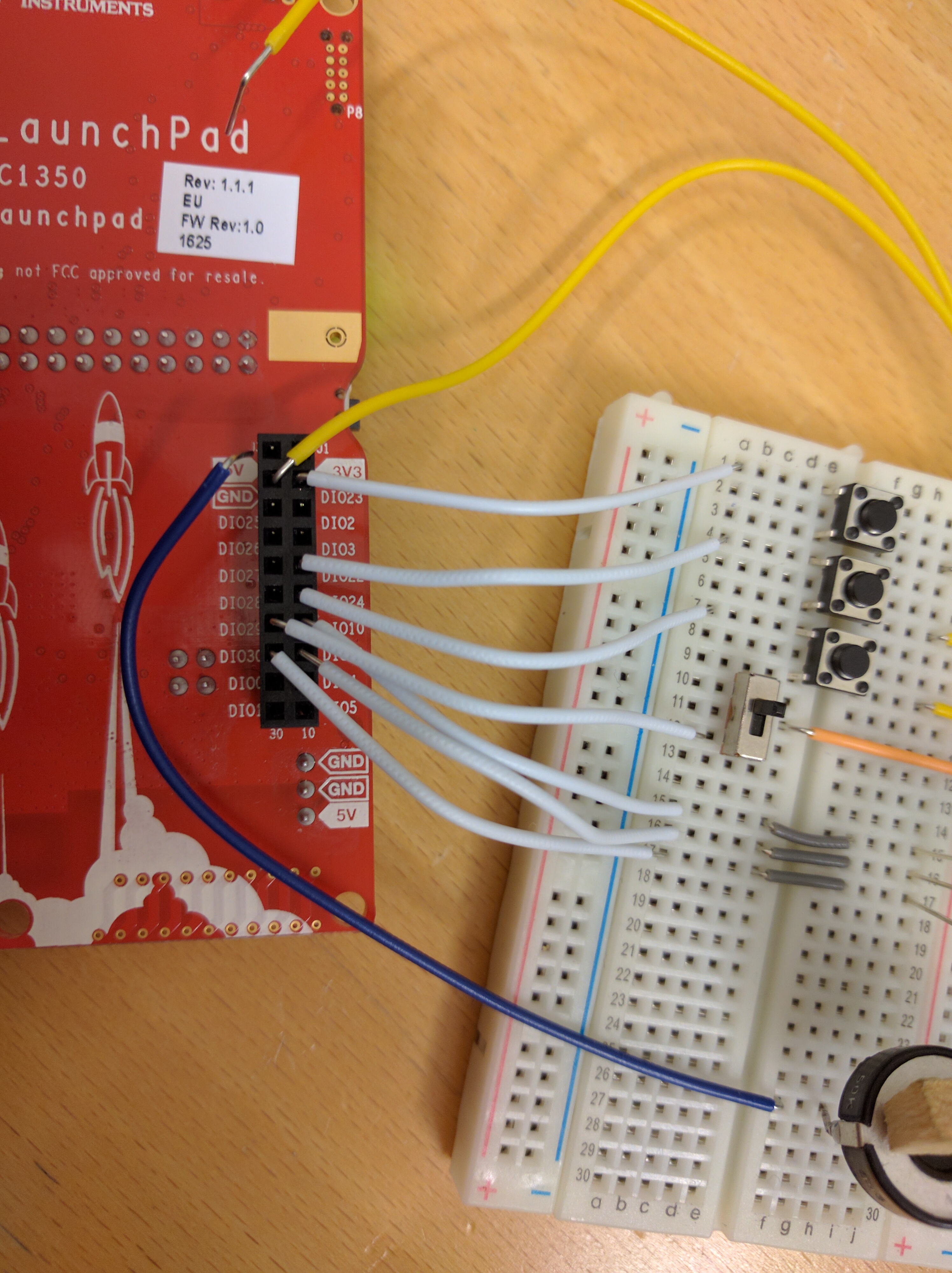
I'm working on making a CCS project that should be able to print the value on some selected GPIOs/PINs and the ADC value of a potmeter to the UART. I'm using a Breadboard with buttons, switch and potmeter as interface. I have done this by combining examples from the TI-RTOS for CC13XX and CC26XX SDK. I have made this project before, but I got quite many errors I could not understand, so I re-installed CCS. Copying the old project into the new one step-by-step, these are the problems I get.
- First copied moduleGPIO_zxc.c into the project and ran it from main. It worked fine. The LEDs responded as expected. Also, as default in most examples, the heartBeatFxn makes the Red LED blink with 1s interval to indicate that the system runs as normal.
- Then copied moduleUART_zxc.c into the project and ran it from main. Worked fine and showed the PIN-values real-time in puTTY.
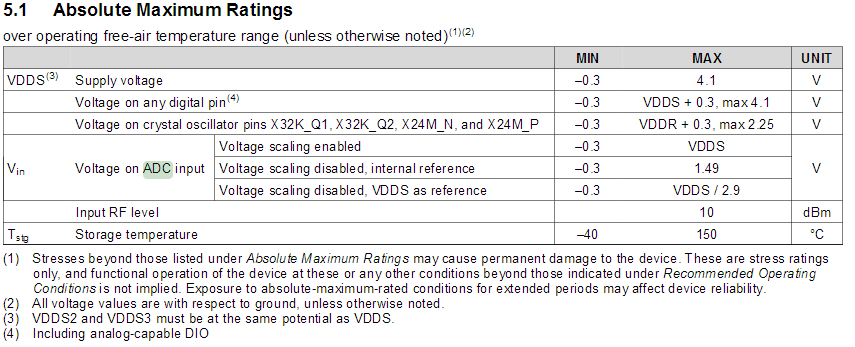
- Then copied moduleADC_zxc.c into the project and attached the potmeter to the Breadboard. When connecting "+"-terminal on the Breadboard to the 3V3-terminal on CC1350LP, something happened and I got the "HW ejected/HW detected" sound in Windows (the 3V3 PIN may also have touched the GND PIN).
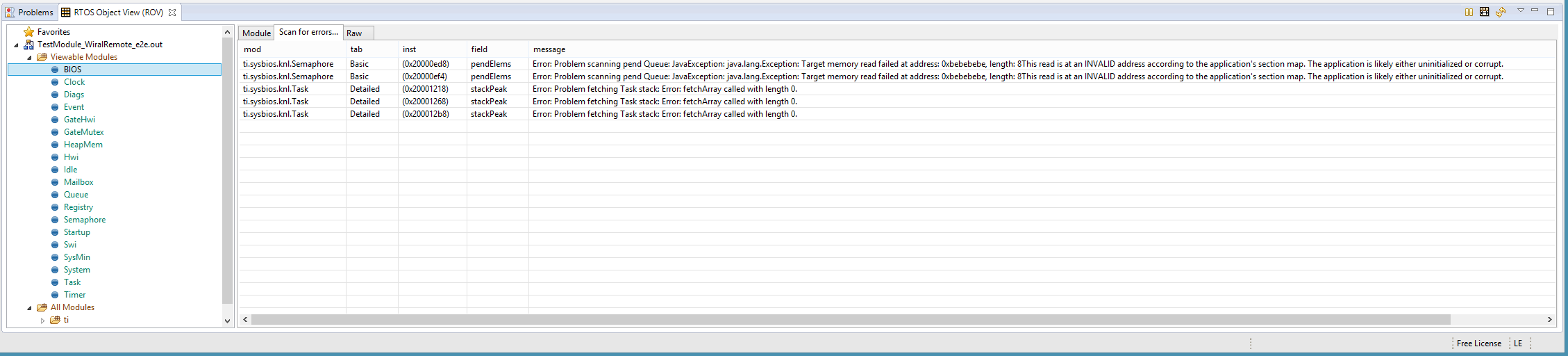
- Trying to run all the modules and display both PIN-values and ADC-values on the UART doesn't work. The red LED never blinks, indicating that the tasks are never executed. When trying to comment out the moduleADC_zxc.c, thus running the system as given in step 2 above, I'm still not able print anything to the UART. Only when commenting out the UART module and go back to step 1 am I able to get the system running.
- I've tried power cycling the CC1350LP without luck. After a few attemps I also got this error:
Cortex_M3_0: Error: (Error -1170 @ 0x0) Unable to access the DAP. Reset the device, and retry the operation. If error persists, confirm configuration, power-cycle the board, and/or try more reliable JTAG settings (e.g. lower TCLK). (Emulation package 6.0.407.6)
Cortex_M3_0: Trouble Halting Target CPU: (Error -2064 @ 0x0) Unable to read device status. Reset the device, and retry the operation. If error persists, confirm configuration, power-cycle the board, and/or try more reliable JTAG settings (e.g. lower TCLK). (Emulation package 6.0.407.6)
Cortex_M3_0: JTAG Communication Error: (Error -1170 @ 0x0) Unable to access the DAP. Reset the device, and retry the operation. If error persists, confirm configuration, power-cycle the board, and/or try more reliable JTAG settings (e.g. lower TCLK). (Emulation package 6.0.407.6)
These problems are similar to what I've gotten before, and they stop me from implementing this functionality into a radio, which is my ultimate goal. I'm therefore very interested in getting feedback to my problems. Attached is my CCS project, and pictures of my Breadboard setup. Note that the "_zxc" naming is just for customization and has no other significance.