


Tool/software: TI-RTOS
Hello, everyone.
I am having a program in which I am using UART task and gpio interrupt as follows.
void buttonCallbackFxn(PIN_Handle handle, PIN_Id pinId) {
SetPinOutput();
PIN_setOutputValue(ledPinHandle, Board_LED0, 1);
CPUdelay(80000*100);
PIN_close(ledPinHandle);
if(init==false)
{
GetFlags();
}
SetPinInput();
}
bool GetFlags()
{
ui8Count=4;
buffer[0]=SYNC;
buffer[2]= GET_FLAGS;
buffer[1]=ui8Count;
buffer[3]=ui8GenerateCheckSum(buffer, ui8Count);
WaitForACK=true;
UART_write(uart,buffer, ui8Count);
Clock_start(clkHandle);
return(true);
};
Void UartTaskFxn(UArg arg0, UArg arg1)
{
UART_Params_init(&uartParams);
uartParams.writeDataMode = UART_DATA_BINARY;
uartParams.readDataMode = UART_DATA_BINARY;
uartParams.readTimeout = 100000;
uartParams.readReturnMode = UART_RETURN_FULL;
uartParams.readEcho = UART_ECHO_OFF;
uartParams.baudRate = 9600;
uart = UART_open(Board_UART0, &uartParams);
if (uart == NULL) {
System_abort("Error opening the UART");
}
while (1)
{
if(init==true)
{
UART_write(uart,buffer, 4);
init=false;
Clock_start(clkHandle);
}
if((WaitForResponse==true) || (WaitForGetResponse==true))
{
if(PktState==PKT_DATA)
{
// for(i=i;i<datalength;i++)
// {
UART_read(uart, buff,1);
buffer[i]=buff[0];
// }
// i=i+datalength;
i++;
// Semaphore_post(txSemaphoreHandle);
}
}
}
}
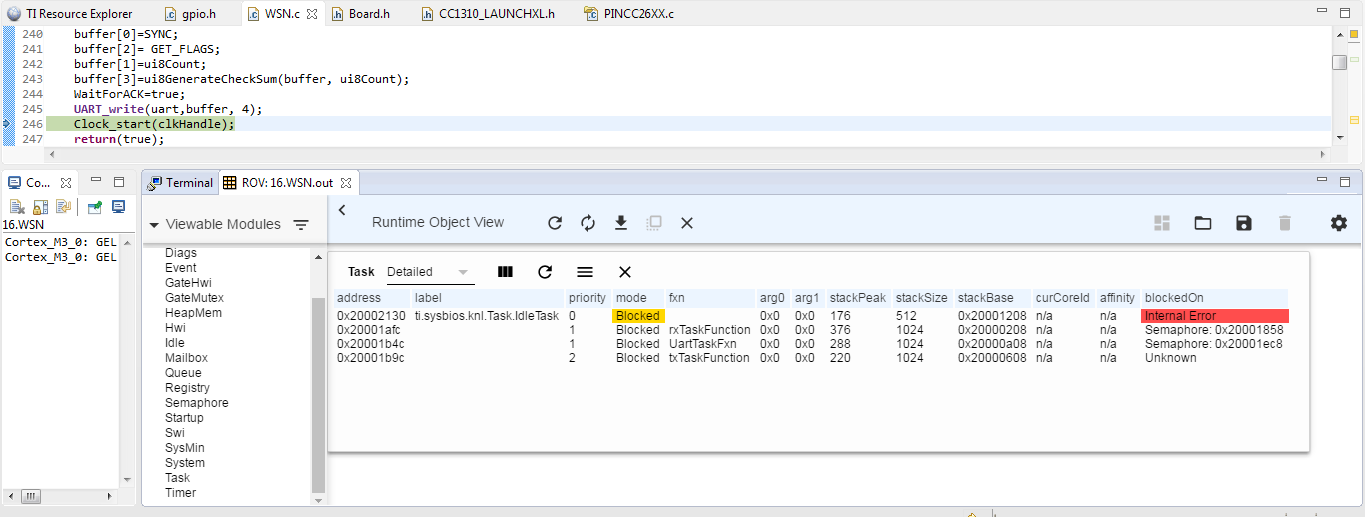
When GPIO interrupt occurs then GetFlags() function is called and when it executes the UART_write(uart,buffer, ui8Count); Then in the ROV ideal task shown to be blocked because of internal error and the whole program stops functioning. Please help me to solve the issue.


{kind=link}