I am working on a CC1310 based board (own design), trying to optimize current consumption.
When application is in low power mode, only the radio wakes up once in a while.
Other tasks is stopped with Semaphore_pend(semC, BIOS_WAIT_FOREVER); This works fin.
Before entering low power mode I want to setup peripherals to consume minimal power.
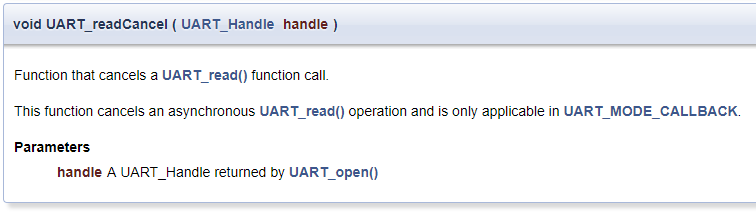
When I close my UART by calling UART_close(), current rises with 2mA...
I have set all unused pins to PIN_INPUT_DIS | PIN_GPIO_OUTPUT_DIS | PIN_NOPULL.
After calling UART_close(), I set RX/TX pins to the above too.
1: UART_close()
2: Set pins inactive
-> 2mA added current.
Why is this happening?
I can't find an application note going through "best practice" to lower power consumption.
Thanks
Kaare