Tool/software: TI-RTOS
Hi
I am currently working on an example of using SPI.
Using sdk: simplelink_cc13x0_sdk_1_60_00_21
ccs version : 7.4.0.00015
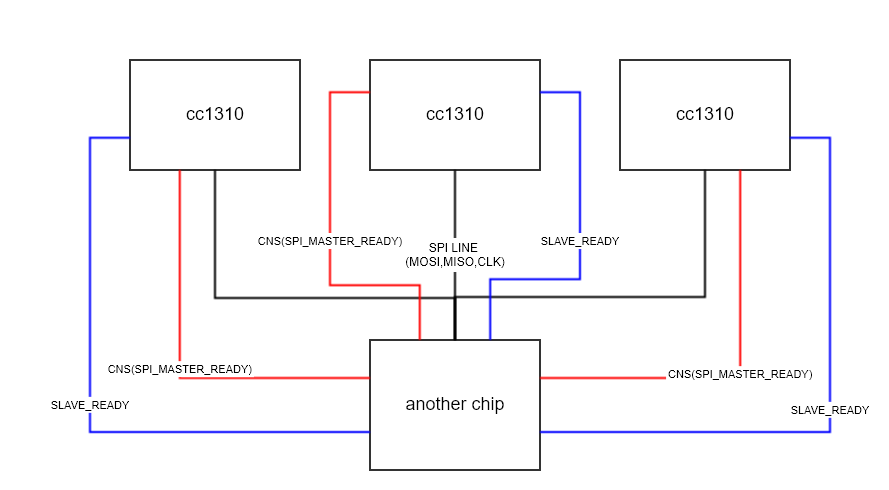
I want to implement SPI communication using SPI's CSN.
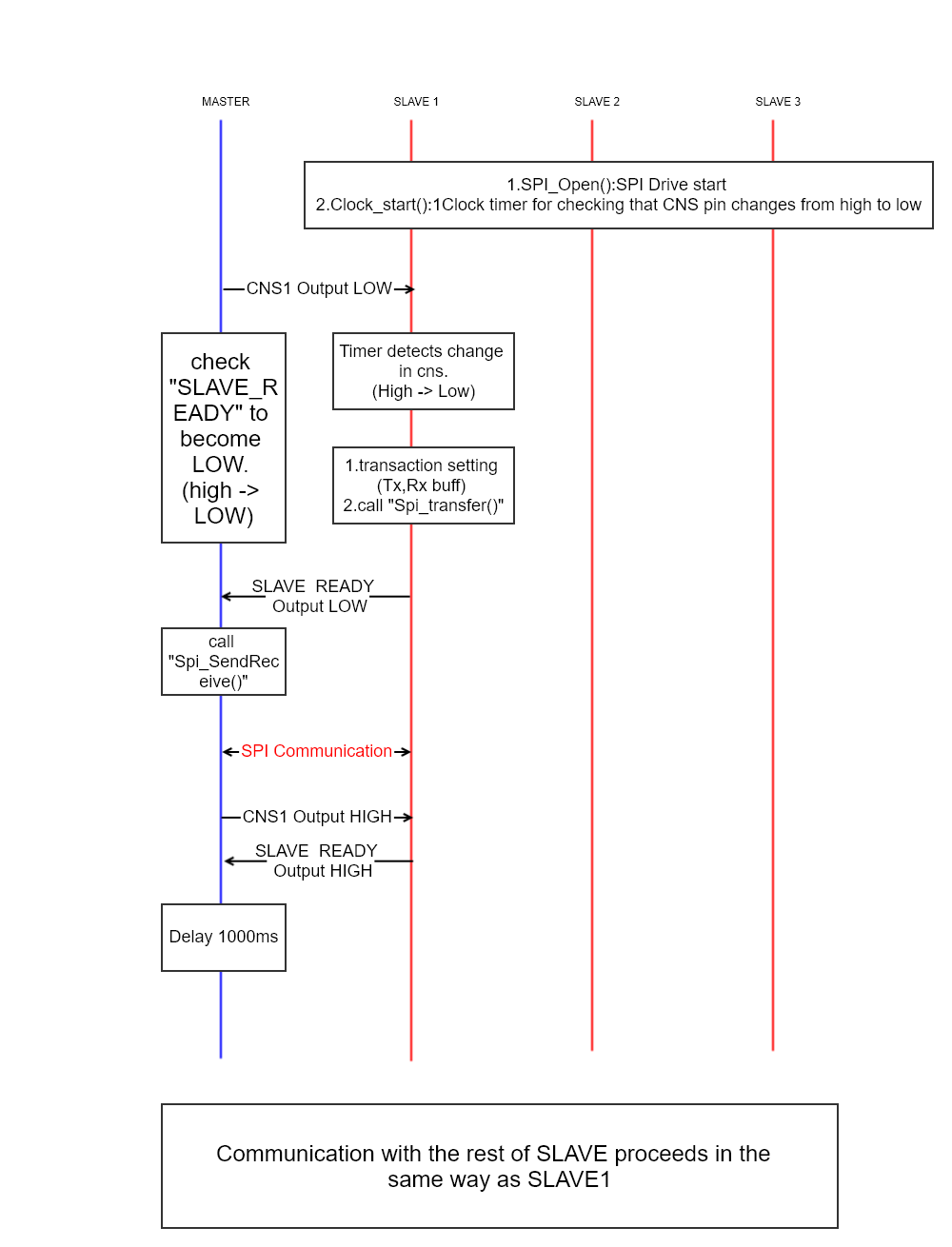
The behavior of my SPI example is as follows.
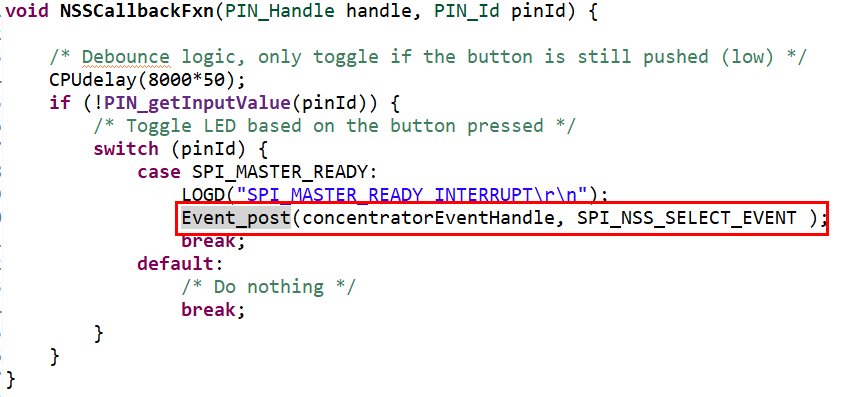
- Interrupt occurs when CNS goes low from HIGH.
- If interrupt occurs, call Event_post (SPI_NSS_SELECT_EVENT) to perform SPI communication.
<project code setting>
First, make the following settings in CC1310_LAUNCHXL.h. (My CSN is IOID_15.)
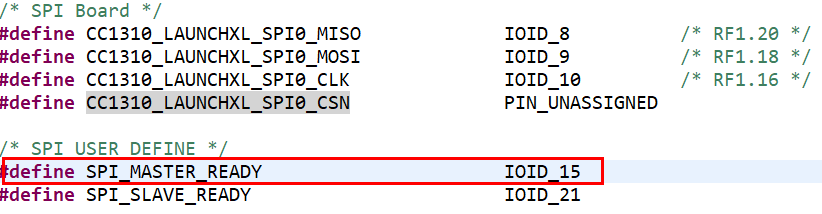
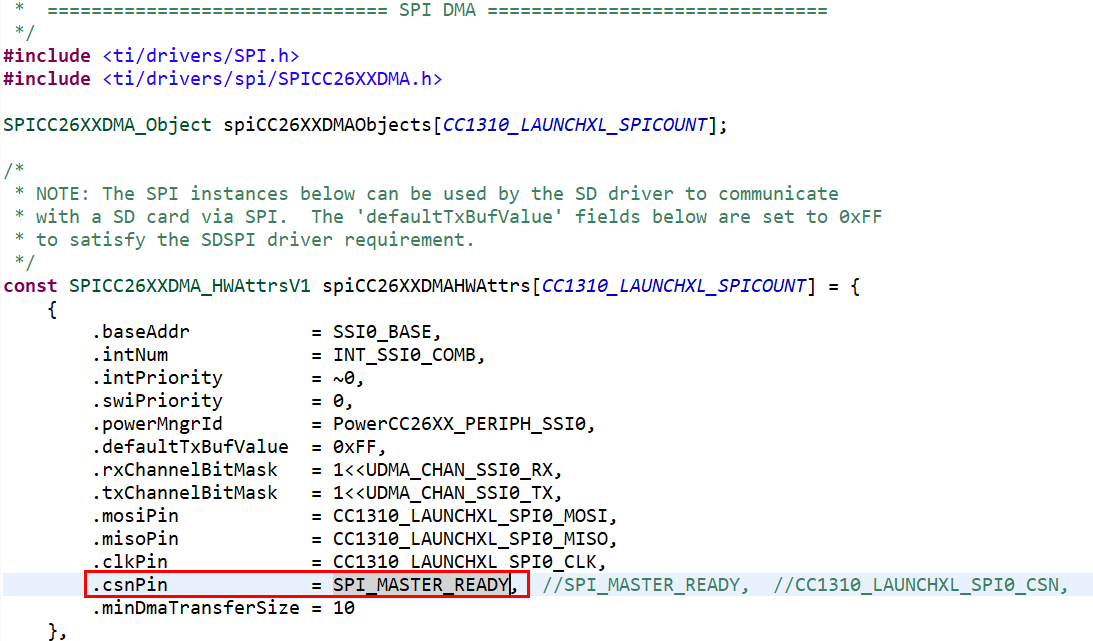
Then make the following settings in CC1310_LAUNCHXL.c.
(pin_init setting , SPI HWAttribute setting)
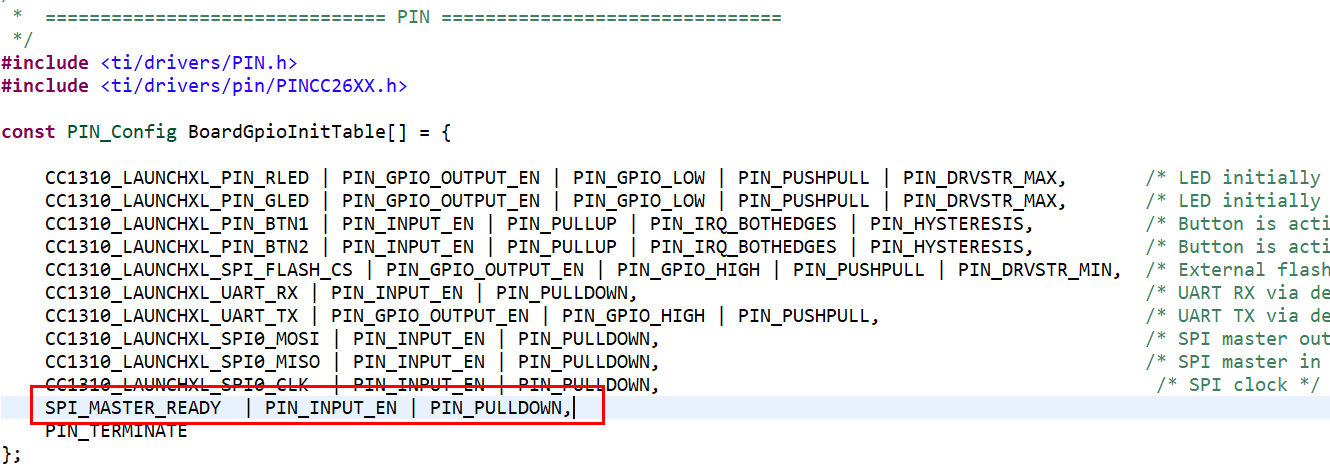
and To receive an interrupt, I set the interrupt on the csn pin.

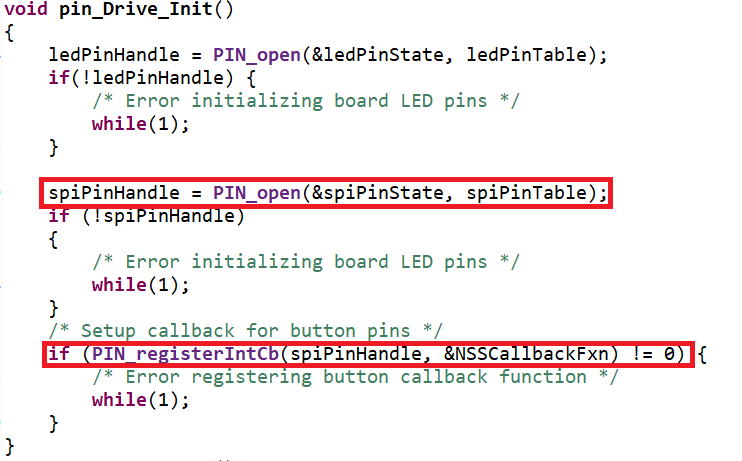
There is a problem here.
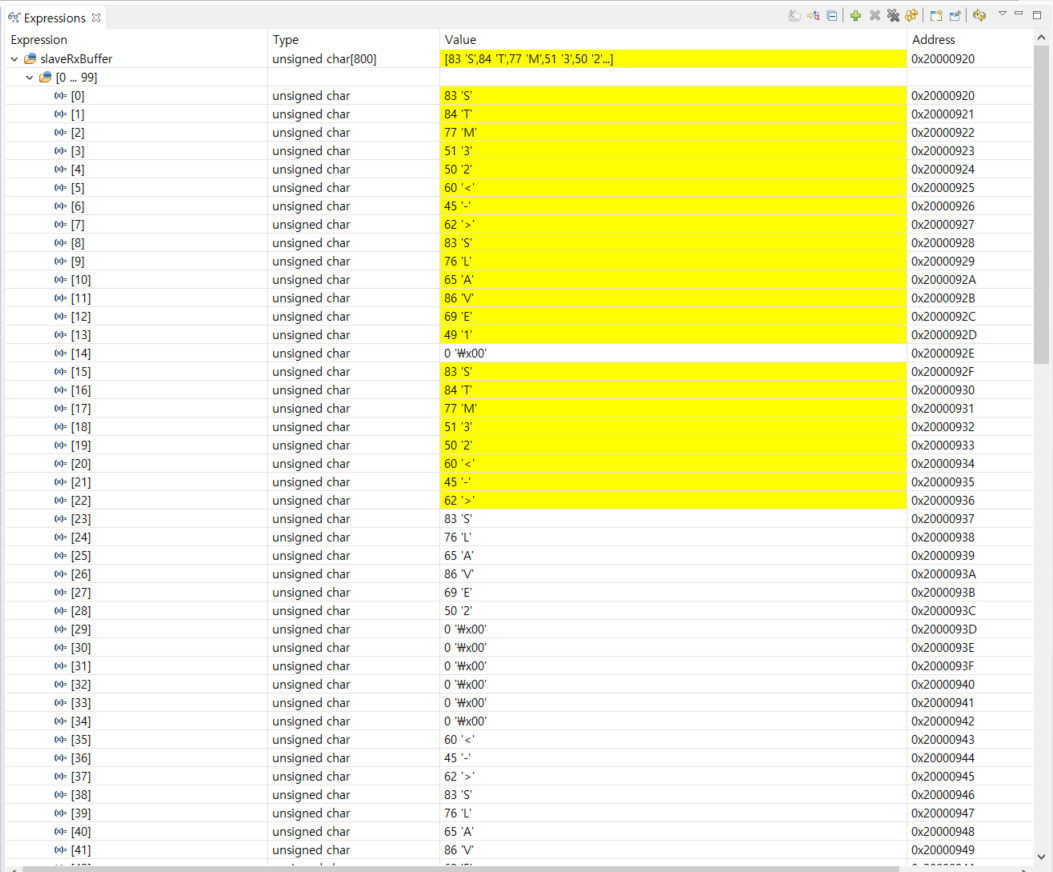
I did debugging because the program did not work properly.
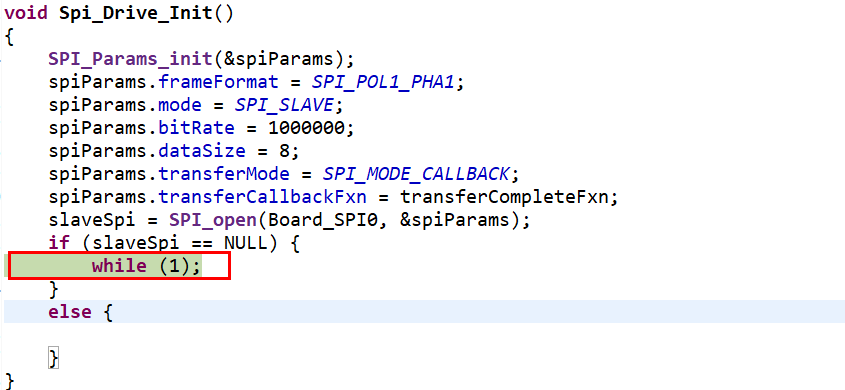
It seems that spi is not open.
Is there a way to use the pin specified by csn as an interrupt?
thanks