Other Parts Discussed in Thread: CC1200DK, CC1200
Hi Team,
My customer got a CC1200DK board and designed their own CC1201 boards based on our reference design. With the same configuration parameter, he got different results:
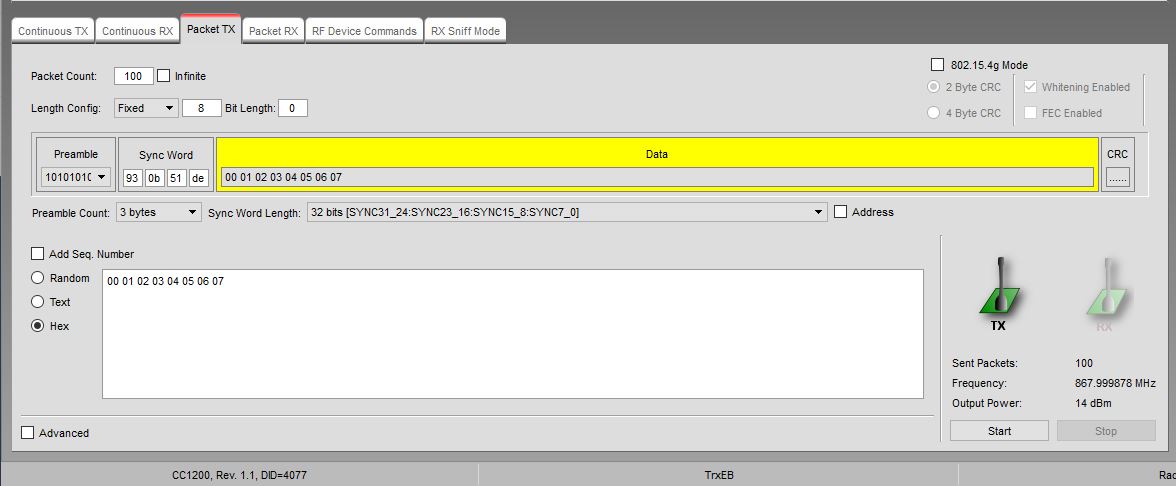
1.TX&RX using their own CC1201 board
If set PKT_LEN= 8, there is unexpected packet loss when receiving; Problem can be solved by setting PKT_LEN= 9.
2.TX using their own CC1201 board, RX using TI CC1200 board.
Still need to set the PKT_LEN= 9 to get correct data, but an additional 0x00 will be added in header.
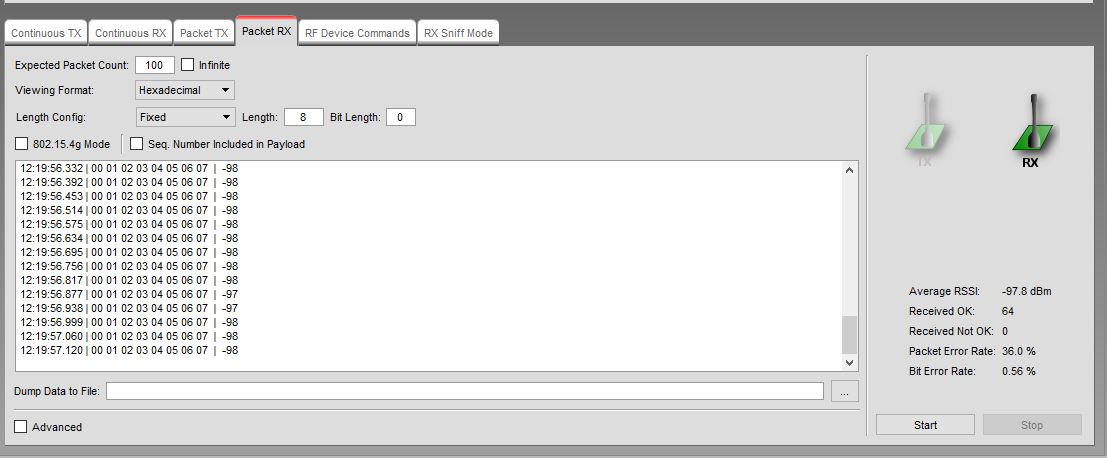
3.TX using TI CC1200 board, RX using their own CC1201 board.
Unexpected packet loss will occur, the PER is about 10%.
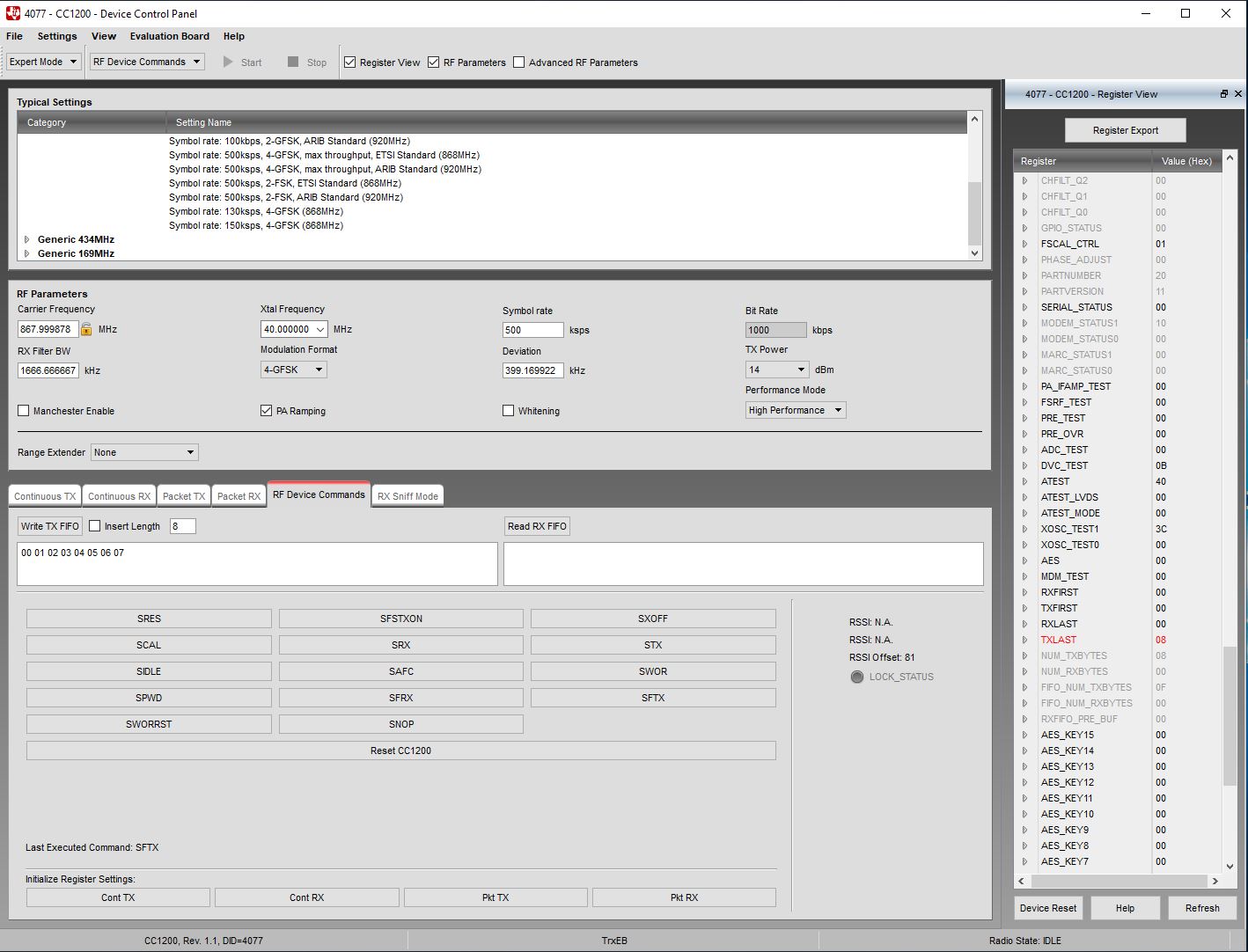
Configurations for cc1200:
static const registerSetting_t preferredSettings[]=
{
{CC1200_IOCFG2, 0x06},
{CC1200_SYNC_CFG1, 0xA8},
{CC1200_DEVIATION_M, 0x47},
{CC1200_MODCFG_DEV_E, 0x2F},
{CC1200_DCFILT_CFG, 0x1E},
{CC1200_PREAMBLE_CFG0, 0x8A},
{CC1200_IQIC, 0x00},
{CC1200_CHAN_BW, 0x01},
{CC1200_MDMCFG1, 0x42},
{CC1200_MDMCFG0, 0x05},
{CC1200_SYMBOL_RATE2, 0xC9},
{CC1200_SYMBOL_RATE1, 0x99},
{CC1200_SYMBOL_RATE0, 0x99},
{CC1200_AGC_REF, 0x2F},
{CC1200_AGC_CS_THR, 0xF8},
{CC1200_AGC_CFG2, 0x60},
{CC1200_AGC_CFG1, 0x12},
{CC1200_AGC_CFG0, 0x84},
{CC1200_FIFO_CFG, 0x00},
{CC1200_FS_CFG, 0x12},
{CC1200_PKT_CFG2, 0x00},
{CC1200_PKT_CFG1, 0x00},
{CC1200_PKT_LEN, 0x09},
{CC1200_FREQOFF_CFG, 0x23},
{CC1200_MDMCFG2, 0x00},
{CC1200_FREQ2, 0x54},
{CC1200_IF_ADC1, 0xEE},
{CC1200_IF_ADC0, 0x10},
{CC1200_FS_DIG1, 0x04},
{CC1200_FS_DIG0, 0xA3},
{CC1200_FS_CAL1, 0x40},
{CC1200_FS_CAL0, 0x0E},
{CC1200_FS_DIVTWO, 0x03},
{CC1200_FS_DSM0, 0x33},
{CC1200_FS_DVC1, 0xF7},
{CC1200_FS_DVC0, 0x0F},
{CC1200_FS_PFD, 0x00},
{CC1200_FS_PRE, 0x6E},
{CC1200_FS_REG_DIV_CML, 0x1C},
{CC1200_FS_SPARE, 0xAC},
{CC1200_FS_VCO0, 0xB5},
{CC1200_IFAMP, 0x0D},
{CC1200_XOSC5, 0x0E},
{CC1200_XOSC1, 0x03},
{CC1200_PARTNUMBER, 0x20},
{CC1200_PARTVERSION, 0x11},
{CC1200_MODEM_STATUS1, 0x10},
};
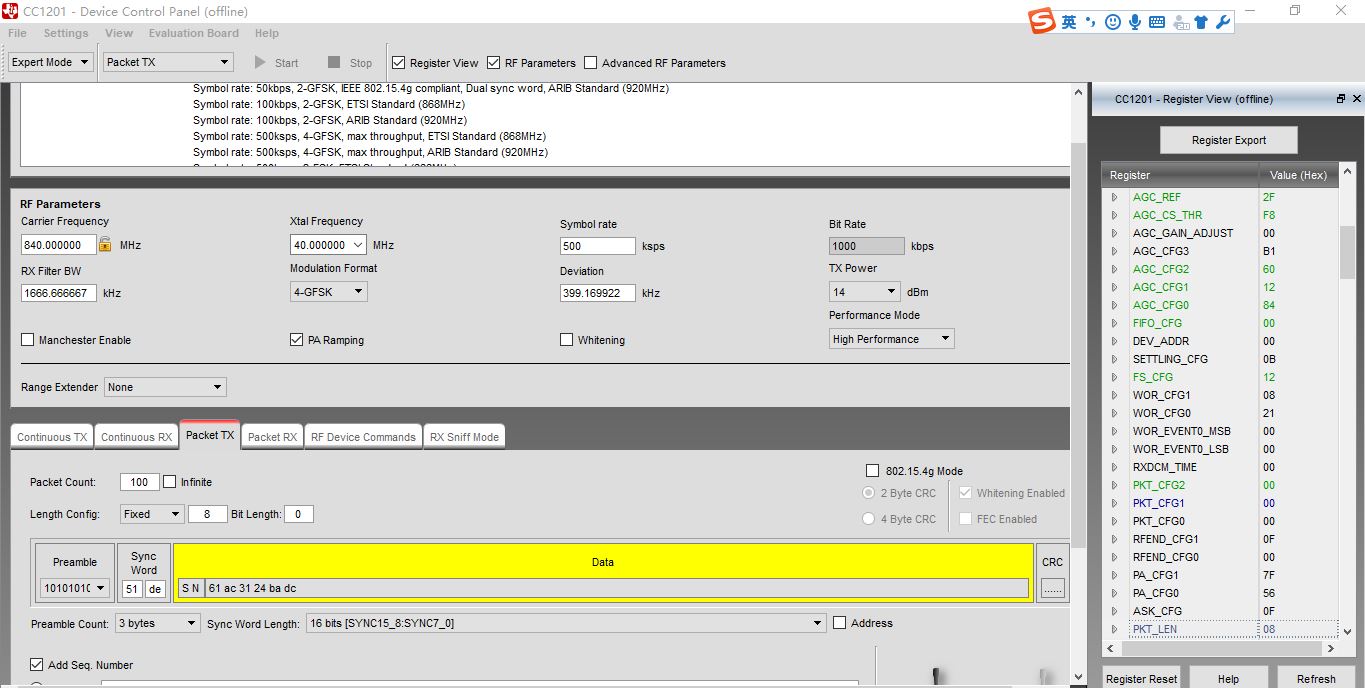
Configurations for CC1201:
static const registerSetting_t preferredSettings[]=
{
{CC120X_IOCFG2, 0x06},
{CC120X_SYNC_CFG1, 0xA8},
{CC120X_DEVIATION_M, 0x47},
{CC120X_MODCFG_DEV_E, 0x2F},
{CC120X_DCFILT_CFG, 0x1E},
{CC120X_PREAMBLE_CFG0, 0x8A},
{CC120X_IQIC, 0x00},
{CC120X_CHAN_BW, 0x01},
{CC120X_MDMCFG1, 0x42},
{CC120X_MDMCFG0, 0x05},
{CC120X_SYMBOL_RATE2, 0xC9},
{CC120X_SYMBOL_RATE1, 0x99},
{CC120X_SYMBOL_RATE0, 0x99},
{CC120X_AGC_REF, 0x2F},
{CC120X_AGC_CS_THR, 0xF8},
{CC120X_AGC_CFG2, 0x60},
{CC120X_AGC_CFG1, 0x12},
{CC120X_AGC_CFG0, 0x84},
{CC120X_FIFO_CFG, 0x40},
{CC120X_FS_CFG, 0x12},
{CC120X_PKT_CFG2, 0x00},
{CC120X_PKT_CFG1, 0x00},
{CC120X_PKT_CFG0, 0x00},//FIX LENGHTH
{CC120X_PKT_LEN, 0x09}, //packet len
{CC120X_FREQOFF_CFG, 0x23},
{CC120X_MDMCFG2, 0x00},
{CC120X_FREQ2, 0x54}, //840M
{CC120X_IF_ADC1, 0xEE},
{CC120X_IF_ADC0, 0x10},
{CC120X_FS_DIG1, 0x04},
{CC120X_FS_DIG0, 0xA3},
{CC120X_FS_CAL1, 0x40},
{CC120X_FS_CAL0, 0x0E},
{CC120X_FS_DIVTWO, 0x03},
{CC120X_FS_DSM0, 0x33},
{CC120X_FS_DVC1, 0xF7},
{CC120X_FS_DVC0, 0x0F},
{CC120X_FS_PFD, 0x00},
{CC120X_FS_PRE, 0x6E},
{CC120X_FS_REG_DIV_CML, 0x1C},
{CC120X_FS_SPARE, 0xAC},
{CC120X_FS_VCO0, 0xB5},
{CC120X_IFAMP, 0x0D},
{CC120X_XOSC5, 0x0E},
{CC120X_XOSC1, 0x03},
}
Questions: 1.Where did the zero byte come from?
2. Why did their boards come into packet loss,is this about hardware design?
Any help will be appreciated.
Best regards,
Viki