


Tool/software: TI-RTOS
Hello,
I am using cc1352R with SDK 3.10 .01.11
I referred this guide
And successfully mixed the portable example in 15.4 sensor_oad.
*) Now I want to check the states of the threads in ROV. First of all, for comparison I checked what all I can see when I run the plain (without any changes) 15.4 Sensor_oad straight out of the Resource Explorer. I found that in the ROV window, I could see the states of the Tasks/Threads (Running, Blocked) which can be seen in the following screenshots.

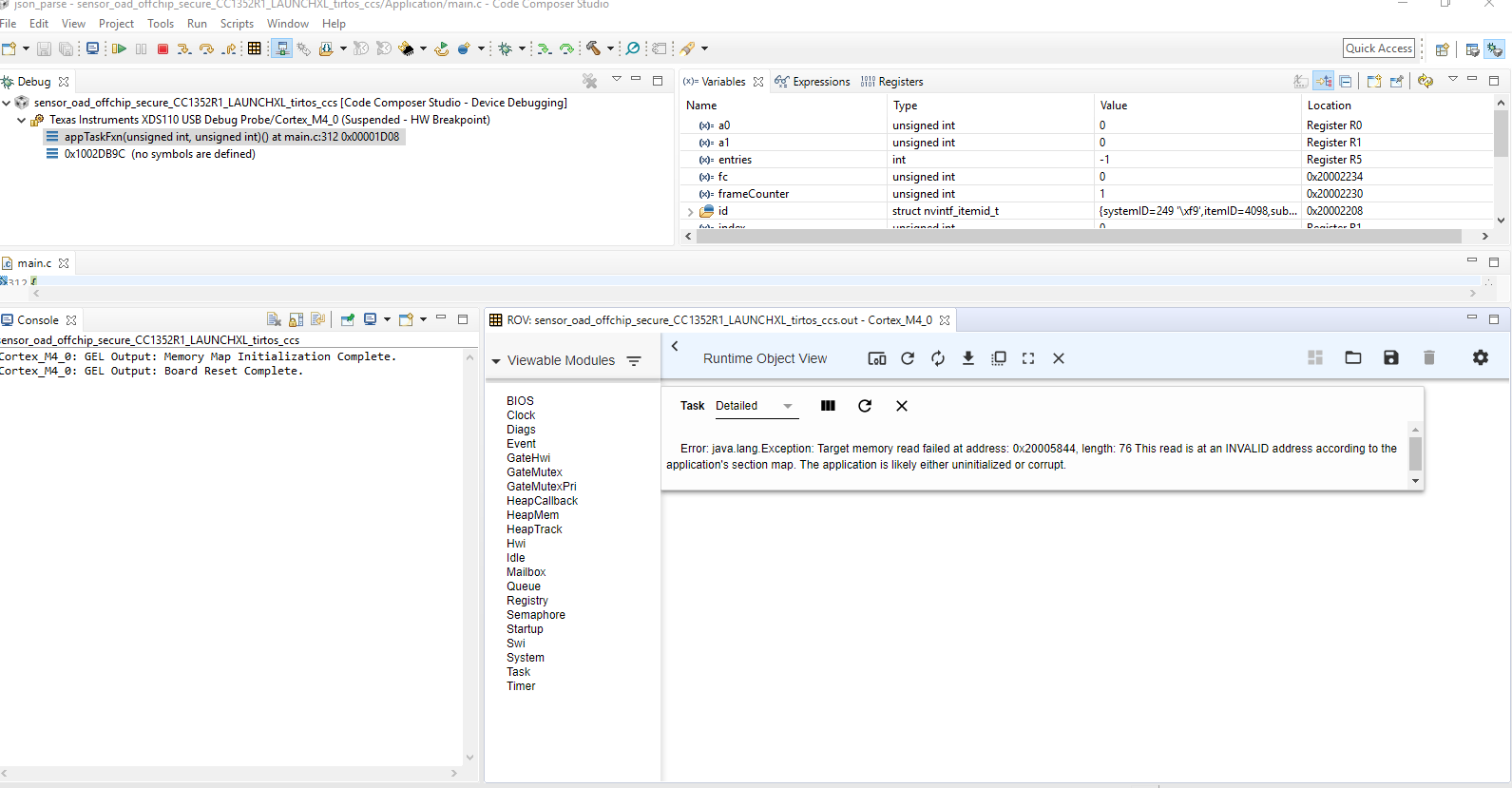
*) Further when I used the Portable mixed Sensor_oad and check the ROV again, I am unable to see the Tasks/Threads which were previously with the plain Sensor_oad. Moreover I wasn’t able to see the states of the Threads I added as the process of mixing Portable. Instead I could see some errors, which I have included in the following Screenshots.

So my question is
1. Is my approach correct ?
2. Is there another way or some other method to look at the Tasks/Threads at hand in portable mixed projects?
Any help will be appreciated.
Thanks,
Kartik


