


Other Parts Discussed in Thread: CC1310
Hi,
I want to use two CC1310 modules in my project to work as transceivers. One of them will work as "Master" and the other as "Slave" I want the master to wake up a slave device every 5 minutes and receive information from the sensor and send it to the master device.
In another project, I communicated two CC1310 modules with each other, but there I ran a module TX as a module RX and woke up the module with KBI and sent the data.
Now I want to wake up the modules over RF, get the information and put them back to sleep in order to improve the project I did before.
Can you guide me on this?
I want to set up a structure like the one below.
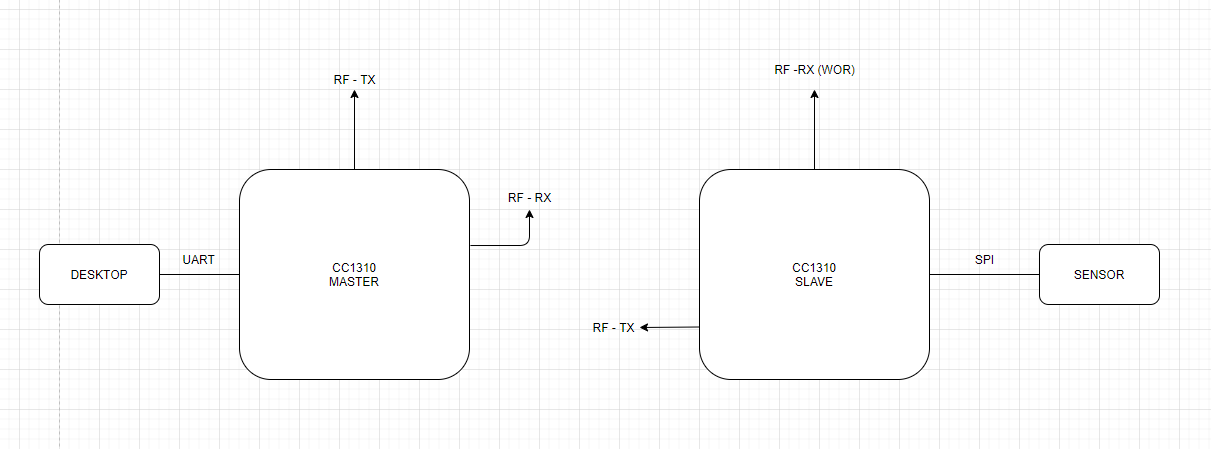
The point I do not understand here is how I will run rxThread and txThread on the same project.
Regards
Ali

