Hi,
I have a custom board with CC1310, My project is using XDCtools [3.51.3.28_core] and SimpleLink CC13x0 SDK[4.10.1.01]. Today I want to make some spi communication with bma400 mems. I searched Sub-1 GHz forum and looked at the spimaster project and did something. But I am not sure if my communication is ok. If it is ok, why I can't see my slave's id ? Could you please suggest me to do something ?
1 ) First of all, I am consufed with pin init, there are lots of example. What is the true init ?
PIN_Config SPIPinTable[] =
{
//1
MEMS_MOSI | PIN_GPIO_OUTPUT_EN | PIN_NOPULL | PIN_PUSHPULL | PIN_DRVSTR_MAX,
MEMS_MISO | PIN_INPUT_EN | PIN_NOPULL | PIN_DRVSTR_MAX,
MEMS_CLK | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
MEMS_CSN | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
//2
// MEMS_MOSI | PIN_INPUT_EN | PIN_PULLDOWN,
// MEMS_MISO | PIN_INPUT_EN | PIN_PULLDOWN,
// MEMS_CLK | PIN_INPUT_EN | PIN_PULLDOWN,
// MEMS_CSN | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
//3
// MEMS_MOSI | PIN_INPUT_EN | PIN_PULLDOWN,
// MEMS_MISO | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL,
// MEMS_CLK | PIN_INPUT_EN | PIN_PULLDOWN,
// MEMS_CSN | PIN_BM_INPUT_EN | PIN_PULLDOWN,
//4
// MEMS_MOSI| PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL,
// MEMS_MISO| PIN_INPUT_EN | PIN_PULLDOWN,
// MEMS_CLK | PIN_INPUT_EN | PIN_PULLDOWN,
// MEMS_CSN | PIN_GPIO_OUTPUT_EN | PIN_GPIO_HIGH | PIN_PUSHPULL | PIN_DRVSTR_MIN,
MEMS_INT1 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
MEMS_INT2 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
PIN_TERMINATE
};
2 ) I have changed CC1310_LAUNCHXL.c and CC1310_LAUNCHXL.h files as below. If it is not okay, please tell me. I especially want you to look at the SPI part and is it okay to delete another parts I won't use ?
#ifndef CC1310_H_
#define CC1310_H_
#ifdef __cplusplus
extern "C" {
#endif
#include <ti/drivers/PIN.h>
#include <ti/devices/cc13x0/driverlib/ioc.h>
#define STA_LED IOID_16
#define MEMS_INT2 IOID_15
#define MEMS_INT1 IOID_14
#define MEMS_MOSI IOID_13
#define MEMS_MISO IOID_12
#define MEMS_CLK IOID_11
#define MEMS_CSN IOID_10
#define TEMP_SCL0 IOID_9
#define TEMP_SDA0 IOID_8
typedef enum CC1310_LAUNCHXL_I2CName {
CC1310_LAUNCHXL_I2C0 = 0,
CC1310_LAUNCHXL_I2CCOUNT
} CC1310_LAUNCHXL_I2CName;
typedef enum CC1310_LAUNCHXL_SPIName {
CC1310_LAUNCHXL_SPI0 = 0,
CC1310_LAUNCHXL_SPI1,
CC1310_LAUNCHXL_SPICOUNT
} CC1310_LAUNCHXL_SPIName;
typedef enum CC1310_LAUNCHXL_UDMAName {
CC1310_LAUNCHXL_UDMA0 = 0,
CC1310_LAUNCHXL_UDMACOUNT
} CC1310_LAUNCHXL_UDMAName;
typedef enum CC1310_LAUNCHXL_WatchdogName {
CC1310_LAUNCHXL_WATCHDOG0 = 0,
CC1310_LAUNCHXL_WATCHDOGCOUNT
} CC1310_LAUNCHXL_WatchdogName;
#ifdef __cplusplus
}
#endif
#endif
#include <CC1310.h>
#include <stdbool.h>
#include <stddef.h>
#include <stdint.h>
#include <ti/devices/cc13x0/driverlib/ioc.h>
#include <ti/devices/cc13x0/driverlib/udma.h>
#include <ti/devices/cc13x0/inc/hw_ints.h>
#include <ti/devices/cc13x0/inc/hw_memmap.h>
#include <ti/drivers/adcbuf/ADCBufCC26XX.h>
/*
* =============================== I2C ===============================
*/
#include <ti/drivers/I2C.h>
#include <ti/drivers/i2c/I2CCC26XX.h>
I2CCC26XX_Object i2cCC26xxObjects[CC1310_LAUNCHXL_I2CCOUNT];
const I2CCC26XX_HWAttrsV1 i2cCC26xxHWAttrs[CC1310_LAUNCHXL_I2CCOUNT] = {
{
.baseAddr = I2C0_BASE,
.powerMngrId = PowerCC26XX_PERIPH_I2C0,
.intNum = INT_I2C_IRQ,
.intPriority = ~0,
.swiPriority = 0,
.sdaPin = TEMP_SDA0,
.sclPin = TEMP_SCL0,
}
};
const I2C_Config I2C_config[CC1310_LAUNCHXL_I2CCOUNT] = {
{
.fxnTablePtr = &I2CCC26XX_fxnTable,
.object = &i2cCC26xxObjects[CC1310_LAUNCHXL_I2C0],
.hwAttrs = &i2cCC26xxHWAttrs[CC1310_LAUNCHXL_I2C0]
}
};
const uint_least8_t I2C_count = CC1310_LAUNCHXL_I2CCOUNT;
/*
* =============================== PIN ===============================
*/
#include <ti/drivers/PIN.h>
#include <ti/drivers/pin/PINCC26XX.h>
const PINCC26XX_HWAttrs PINCC26XX_hwAttrs = {
.intPriority = ~0,
.swiPriority = 0
};
/*
* =============================== Power ===============================
*/
#include <ti/drivers/Power.h>
#include <ti/drivers/power/PowerCC26XX.h>
const PowerCC26XX_Config PowerCC26XX_config = {
.policyInitFxn = NULL,
.policyFxn = &PowerCC26XX_standbyPolicy,
.calibrateFxn = &PowerCC26XX_calibrate,
.enablePolicy = true,
.calibrateRCOSC_LF = true,
.calibrateRCOSC_HF = true,
};
/*
* =============================== RF Driver ===============================
*/
#include <ti/drivers/rf/RF.h>
const RFCC26XX_HWAttrsV2 RFCC26XX_hwAttrs = {
.hwiPriority = ~0, /* Lowest HWI priority */
.swiPriority = 0, /* Lowest SWI priority */
.xoscHfAlwaysNeeded = true, /* Keep XOSC dependency while in standby */
.globalCallback = NULL, /* No board specific callback */
.globalEventMask = 0 /* No events subscribed to */
};
/*
* =============================== SPI DMA ===============================
*/
#include <ti/drivers/SPI.h>
#include <ti/drivers/spi/SPICC26XXDMA.h>
SPICC26XXDMA_Object spiCC26XXDMAObjects[CC1310_LAUNCHXL_SPICOUNT];
/*
* NOTE: The SPI instances below can be used by the SD driver to communicate
* with a SD card via SPI. The 'defaultTxBufValue' fields below are set to 0xFF
* to satisfy the SDSPI driver requirement.
*/
const SPICC26XXDMA_HWAttrsV1 spiCC26XXDMAHWAttrs[CC1310_LAUNCHXL_SPICOUNT] = {
{
.baseAddr = SSI0_BASE,
.intNum = INT_SSI0_COMB,
.intPriority = ~0,
.swiPriority = 0,
.powerMngrId = PowerCC26XX_PERIPH_SSI0,
.defaultTxBufValue = 0,
.rxChannelBitMask = 1<<UDMA_CHAN_SSI0_RX,
.txChannelBitMask = 1<<UDMA_CHAN_SSI0_TX,
.mosiPin = MEMS_MOSI,
.misoPin = MEMS_MISO,
.clkPin = MEMS_CLK,
.csnPin = MEMS_CSN,
// .minDmaTransferSize = 10
},
{
.baseAddr = SSI1_BASE,
.intNum = INT_SSI1_COMB,
.intPriority = ~0,
.swiPriority = 0,
.powerMngrId = PowerCC26XX_PERIPH_SSI1,
.defaultTxBufValue = 0,
.rxChannelBitMask = 1<<UDMA_CHAN_SSI1_RX,
.txChannelBitMask = 1<<UDMA_CHAN_SSI1_TX,
.mosiPin = 0xFF,
.misoPin = 0xFF,
.clkPin = 0xFF,
.csnPin = 0xFF,
// .minDmaTransferSize = 10
}
};
const SPI_Config SPI_config[CC1310_LAUNCHXL_SPICOUNT] = {
{
.fxnTablePtr = &SPICC26XXDMA_fxnTable,
.object = &spiCC26XXDMAObjects[CC1310_LAUNCHXL_SPI0],
.hwAttrs = &spiCC26XXDMAHWAttrs[CC1310_LAUNCHXL_SPI0]
},
{
.fxnTablePtr = &SPICC26XXDMA_fxnTable,
.object = &spiCC26XXDMAObjects[CC1310_LAUNCHXL_SPI1],
.hwAttrs = &spiCC26XXDMAHWAttrs[CC1310_LAUNCHXL_SPI1]
},
};
const uint_least8_t SPI_count = CC1310_LAUNCHXL_SPICOUNT;
/*
* =============================== UDMA ===============================
*/
#include <ti/drivers/dma/UDMACC26XX.h>
UDMACC26XX_Object udmaObjects[CC1310_LAUNCHXL_UDMACOUNT];
const UDMACC26XX_HWAttrs udmaHWAttrs[CC1310_LAUNCHXL_UDMACOUNT] = {
{
.baseAddr = UDMA0_BASE,
.powerMngrId = PowerCC26XX_PERIPH_UDMA,
.intNum = INT_DMA_ERR,
.intPriority = ~0
}
};
const UDMACC26XX_Config UDMACC26XX_config[CC1310_LAUNCHXL_UDMACOUNT] = {
{
.object = &udmaObjects[CC1310_LAUNCHXL_UDMA0],
.hwAttrs = &udmaHWAttrs[CC1310_LAUNCHXL_UDMA0]
},
};
/*
* =============================== Watchdog ===============================
*/
#include <ti/drivers/Watchdog.h>
#include <ti/drivers/watchdog/WatchdogCC26XX.h>
WatchdogCC26XX_Object watchdogCC26XXObjects[CC1310_LAUNCHXL_WATCHDOGCOUNT];
const WatchdogCC26XX_HWAttrs watchdogCC26XXHWAttrs[CC1310_LAUNCHXL_WATCHDOGCOUNT] = {
{
.baseAddr = WDT_BASE,
.reloadValue = 1000 /* Reload value in milliseconds */
},
};
const Watchdog_Config Watchdog_config[CC1310_LAUNCHXL_WATCHDOGCOUNT] = {
{
.fxnTablePtr = &WatchdogCC26XX_fxnTable,
.object = &watchdogCC26XXObjects[CC1310_LAUNCHXL_WATCHDOG0],
.hwAttrs = &watchdogCC26XXHWAttrs[CC1310_LAUNCHXL_WATCHDOG0]
},
};
const uint_least8_t Watchdog_count = CC1310_LAUNCHXL_WATCHDOGCOUNT;
3 ) Let's see SPI function,
#define SPI_MSG_LENGTH (2)
unsigned char txBuf[SPI_MSG_LENGTH];
unsigned char rxBuf[SPI_MSG_LENGTH];
void AccelTaskFunction(UArg arg0, UArg arg1)
{
SPI_Handle masterSpi;
SPI_Params params;
SPI_Transaction transaction;
bool transferOK;
SPI_init();
SPI_Params_init(¶ms);
params.bitRate = 1000000;
params.dataSize = 8;
params.frameFormat = SPI_POL0_PHA0;
params.mode = SPI_MASTER;
params.transferCallbackFxn = NULL;
params.transferMode= SPI_MODE_BLOCKING;
// params.transferTimeout = SPI_WAIT_FOREVER;
masterSpi = SPI_open(0, ¶ms);
if (masterSpi == NULL) {
while (1);
}
while(1)
{
usleep(954400);//almost 1 second wait
txBuf[0] = 0x00;
txBuf[1] = 0x00;
transaction.count = 2;
transaction.txBuf = txBuf;
// transaction.rxBuf = NULL;
transaction.rxBuf = rxBuf;
transferOK = SPI_transfer(masterSpi, &transaction);
}
}
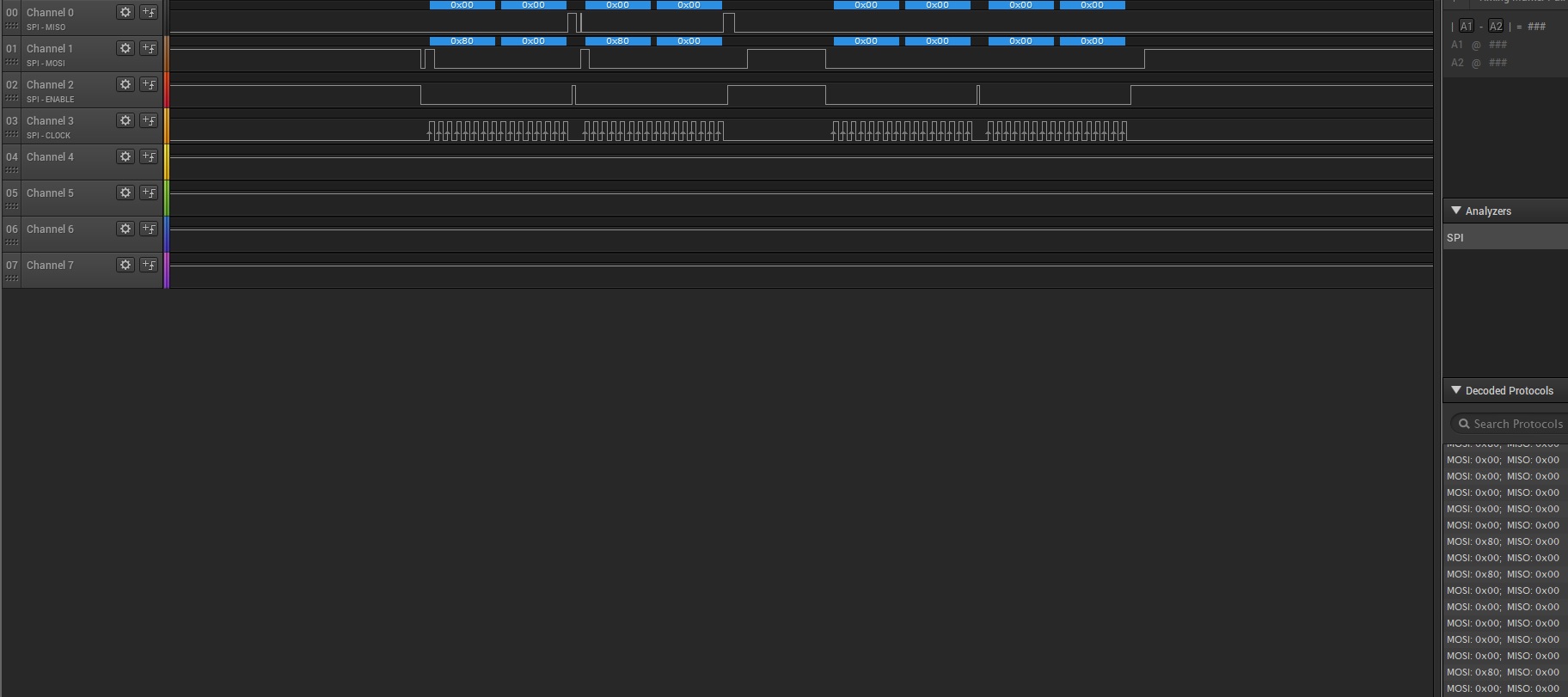
4 ) here is the logic analyzer output. I see a warning as below in first communication try.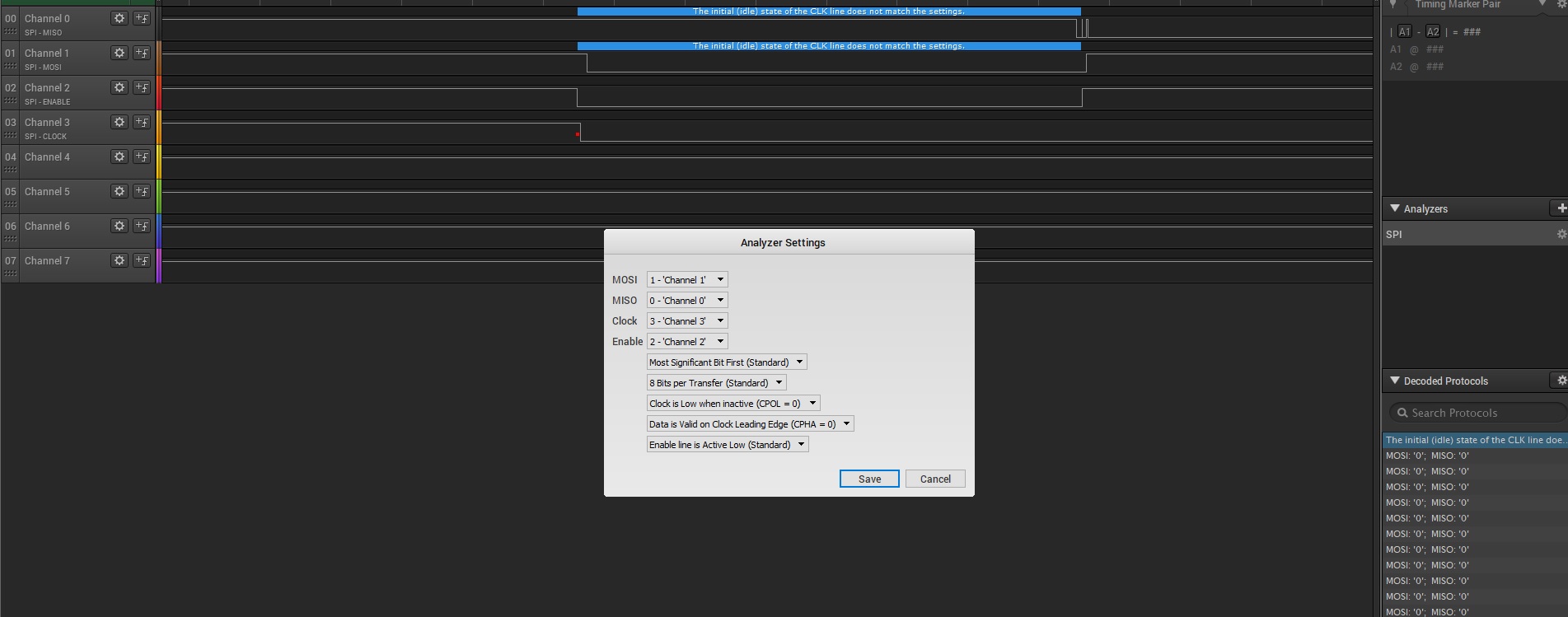
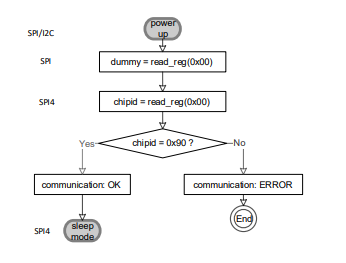
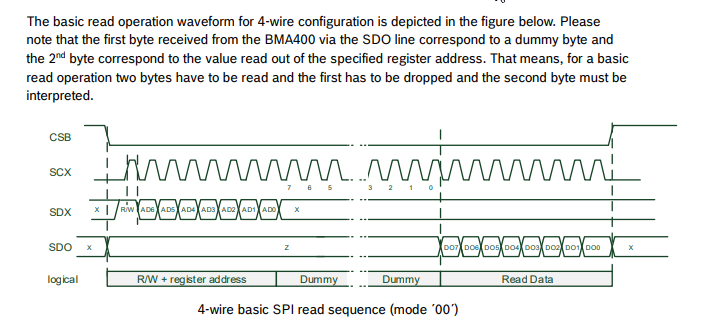
and I send 0x00 0x00 to bma400 to read it's chip id. The answer is as below.