Hi to everybody ,
I have an error when I try to enable the accelerometer inside the board
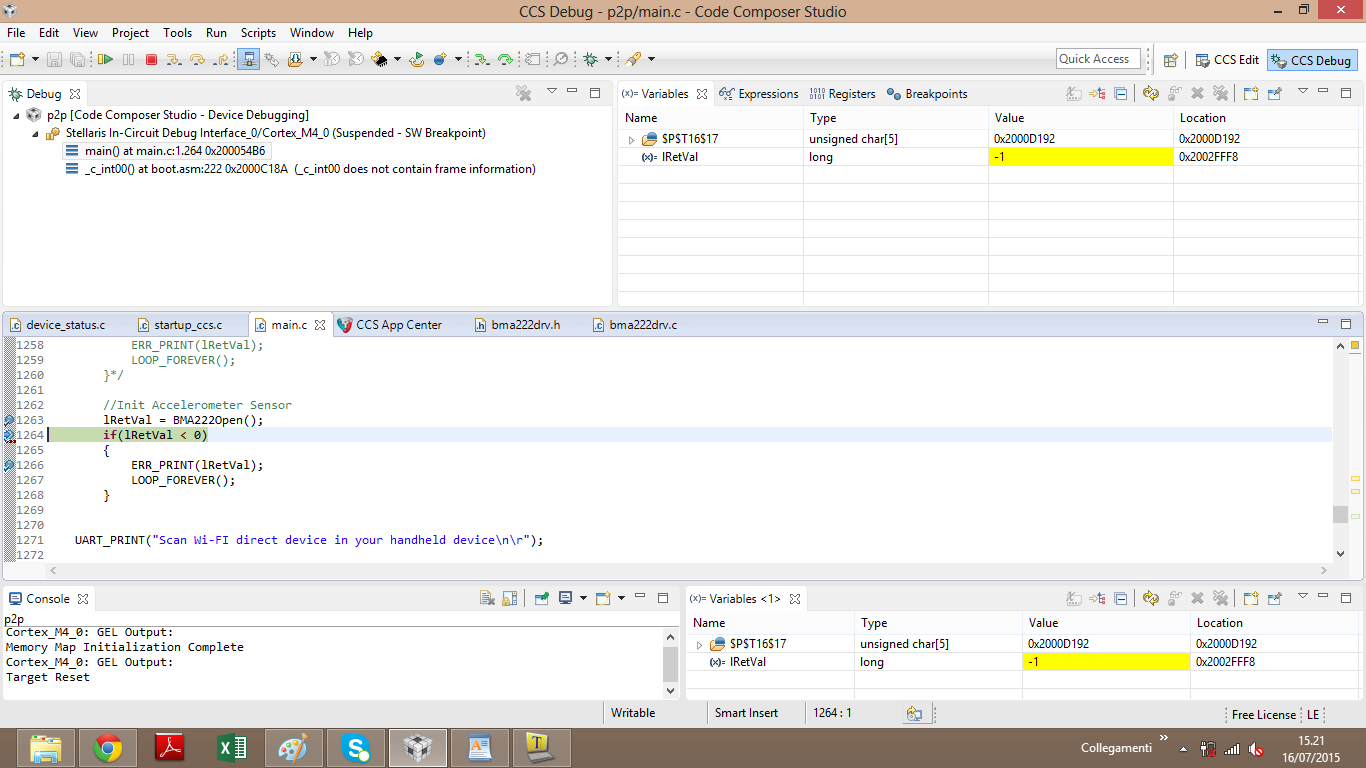
//Init Accelerometer Sensor
lRetVal = BMA222Open();
if(lRetVal < 0)
{
ERR_PRINT(lRetVal);
LOOP_FOREVER();
}
I put both jumper on the J2 (SDA) and J3 ( SCL) .
I need to do other things ??