Other Parts Discussed in Thread: CC3235S
Tool/software: Code Composer Studio
Hi TI,
I am trying to establish connection between my launch pad cc3235s as master and power supply (uses rs232) for that i have usb to ttl converter.
and here i am using both uart port of cc3235s, one for debugger and another for ttl. see following picture to get idea what i am trying to do.
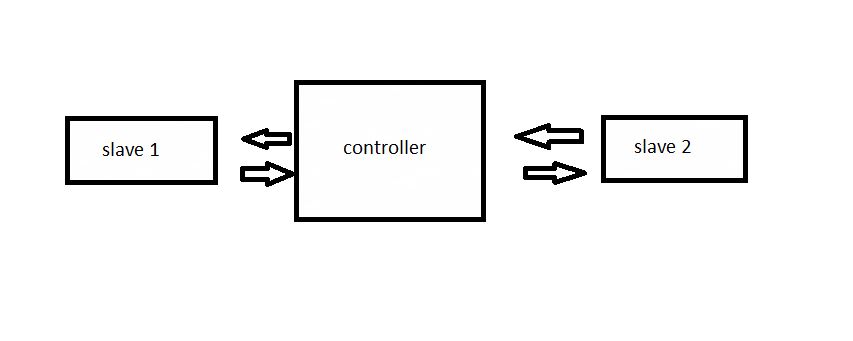
firstly i want to establish connection with single slave once it is done than i will send same data with some modification(as per requirement) to the another slave.
in first step:
i am using uartecho program.
uint8_t getStatusB[] = { 0xFF, 0x08, 0x02, 0x00, 0x01, 0x01, 0x00, 0x0B };
this is the command which i want to sent over uart and in response i should get 28 byte of packet. for i have declared
uint8_t receivedDataPacket[28];
here is my uart initialization part
UART_init();
/* Create a UART with data processing off. */
UART_Params_init(&uartParams);
uartParams.writeDataMode = UART_DATA_BINARY;
uartParams.readDataMode = UART_DATA_BINARY;
uartParams.readReturnMode = UART_RETURN_FULL;
uartParams.readCallback=(UART_Callback)readCallback;
// uartParams.readEcho = UART_ECHO_OFF;
uartParams.dataLength = UART_LEN_8;
uartParams.stopBits = UART_STOP_ONE;
uartParams.parityType = UART_PAR_NONE;
uartParams.baudRate = 9600;
uart = UART_open(CONFIG_UART_0, &uartParams);
uart2 = UART_open(CONFIG_UART_1, &uartParams);
if (uart2 == NULL)
{
/* UART_open() failed */
while (1)
;
}
if (uart == NULL)
{
/* UART_open() failed */
while (1)
;
}
UART_write(uart, echoPrompt, sizeof(echoPrompt));
UART_write(uart2, echoPrompt2, sizeof(echoPrompt2));
i am using both uarts.
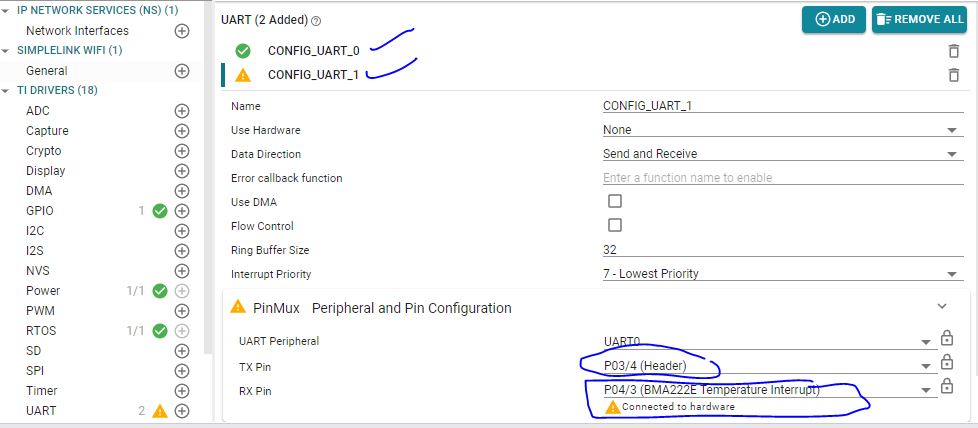
hardware xds110 is connected with uart 0 so debugger is working well. and second uart is connected with my ttl pin p03 and p04 , and my slave is not connected only ttl is connected with controller. i am getting echo character over p03 and p04 (or on serial port).
but when i am connecting slave and sending command data instead of single char, no response is coming back.
please help me out and do let me known where i am making mistake.
here is my complete code.
/*
* Copyright (c) 2015-2019, Texas Instruments Incorporated
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions
* are met:
*
* * Redistributions of source code must retain the above copyright
* notice, this list of conditions and the following disclaimer.
*
* * Redistributions in binary form must reproduce the above copyright
* notice, this list of conditions and the following disclaimer in the
* documentation and/or other materials provided with the distribution.
*
* * Neither the name of Texas Instruments Incorporated nor the names of
* its contributors may be used to endorse or promote products derived
* from this software without specific prior written permission.
*
* THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS"
* AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO,
* THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR
* PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT OWNER OR
* CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL,
* EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO,
* PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS;
* OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY,
* WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR
* OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*/
/*
* ======== uartecho.c ========
*/
#include <stdint.h>
#include <stddef.h>
#include <unistd.h>
#include <string.h>
/* Driver Header files */
#include <ti/drivers/GPIO.h>
#include <ti/drivers/UART.h>
/* Driver configuration */
#include "ti_drivers_config.h"
#include "uart_term.h"
typedef enum
{
INTERNAL_LIBRARY, EXTERNAL_LIBRARY
} intEx;
intEx interanlLIB_or_externaLIB = INTERNAL_LIBRARY;
int i = 0;
static void sendData(void);
static void setData(void);
static void readCallback(UART_Handle handle, void *buffer, size_t size);
char input2;
uint8_t getStatusB[] = { 0xFF, 0x08, 0x02, 0x00, 0x01, 0x01, 0x00, 0x0B };
uint8_t setToRectBQry[] = { 0xFF, 0x12, 0x02, 0x00, 0x00, 0x01, 0x0C, 0x01,
0xC7, 0x03, 0xE8, 0x02, 0x4E, 0x01, 0x00, 0x00,
0x00, 0x24 };
UART_Handle uart;
UART_Handle uart2;
uint8_t receivedDataPacket[28];
/*
* ======== mainThread ========
*/
void* mainThread(void *arg0)
{
uint8_t input;
const char echoPrompt[] = "Echoing characters from uart:\r\n";
const char echoPrompt2[] = "Echoing characters from uart2:\r\n";
UART_Params uartParams;
/* Call driver init functions */
GPIO_init();
switch (interanlLIB_or_externaLIB)
{
case INTERNAL_LIBRARY:
UART_init();
/* Create a UART with data processing off. */
UART_Params_init(&uartParams);
uartParams.writeDataMode = UART_DATA_BINARY;
uartParams.readDataMode = UART_DATA_BINARY;
uartParams.readReturnMode = UART_RETURN_FULL;
uartParams.readCallback=(UART_Callback)readCallback;
// uartParams.readEcho = UART_ECHO_OFF;
uartParams.dataLength = UART_LEN_8;
uartParams.stopBits = UART_STOP_ONE;
uartParams.parityType = UART_PAR_NONE;
uartParams.baudRate = 9600;
uart = UART_open(CONFIG_UART_0, &uartParams);
uart2 = UART_open(CONFIG_UART_1, &uartParams);
if (uart2 == NULL)
{
/* UART_open() failed */
while (1)
;
}
if (uart == NULL)
{
/* UART_open() failed */
while (1)
;
}
UART_write(uart, echoPrompt, sizeof(echoPrompt));
UART_write(uart2, echoPrompt2, sizeof(echoPrompt2));
break;
case EXTERNAL_LIBRARY:
InitTerm();
UART_PRINT("Echoing characters:---\r\n");
break;
};
/* Configure the LED pin */
GPIO_setConfig(CONFIG_GPIO_LED_0, GPIO_CFG_OUT_STD | GPIO_CFG_OUT_LOW);
/* Turn on user LED */
GPIO_write(CONFIG_GPIO_LED_0, CONFIG_GPIO_LED_ON);
memset((void*) receivedDataPacket, 0, sizeof(receivedDataPacket));
// sendData();
setData();
// while (1)
// {
// usleep(20000);
// UART_read(uart2, &input, sizeof(input));
// UART_write(uart2, &input, sizeof(input));
// }
}
static void sendData()
{
/* Loop forever echoing */
while (i < sizeof(setToRectBQry))
{
switch (interanlLIB_or_externaLIB)
{
case INTERNAL_LIBRARY:
// UART_write(uart2, &getStatusB[i], sizeof(getStatusB[i]));
UART_writePolling(uart2, &setToRectBQry[i], sizeof(setToRectBQry[i]));
i++;
break;
case EXTERNAL_LIBRARY:
Message((char*)getStatusB[i++]);
usleep(20000);
// UART_writePolling(uart, getStatusB, sizeof(getStatusB));
break;
};
// UART_write(uart, sendDataPacket, sizeof(sendDataPacket));
// UART_read(uart, &input, 1);
}
}
static void setData()
{
i = 0;
/* Loop forever echoing */
while (i < sizeof(setToRectBQry))
{
switch (interanlLIB_or_externaLIB)
{
case INTERNAL_LIBRARY:
UART_write(uart2, &setToRectBQry[i], sizeof(setToRectBQry[i]));
// UART_writePolling(uart2, &setToRectBQry[i],sizeof(setToRectBQry[i]));
i++;
break;
case EXTERNAL_LIBRARY:
UART_writePolling(uart, getStatusB, sizeof(getStatusB));
break;
};
// UART_write(uart, sendDataPacket, sizeof(sendDataPacket));
// UART_read(uart, &input, 1);
}
}
static void readCallback(UART_Handle handle, void *buffer, size_t size)
{
if(0xFF==(*(uint8_t*)buffer))
{
if(size==28)
{
// ddress_h = ((uint8_t*)buffer)[1];
// address_l = ((uint8_t*)buffer)[2];
// cmd = ((uint8_t*)buffer)[3];
// data = ((uint8_t*)buffer)[4];
// checksum = ((uint8_t*)buffer)[5];
UART_read(uart2, receivedDataPacket, sizeof(receivedDataPacket));
}
else // size will always be 28 so this is unneccessary
{
UART_readCancel(uart2);
}
}
else
{
UART_readCancel(uart2);
}
// i=0;
// while(i<sizeof(receivedDataPacket))
// {
// UART_write(uart2, &receivedDataPacket[i], sizeof(receivedDataPacket[i]));
// i++;
// }
}
thanks in advance.
Br,
sarju bhatnagar