

Hello,
I
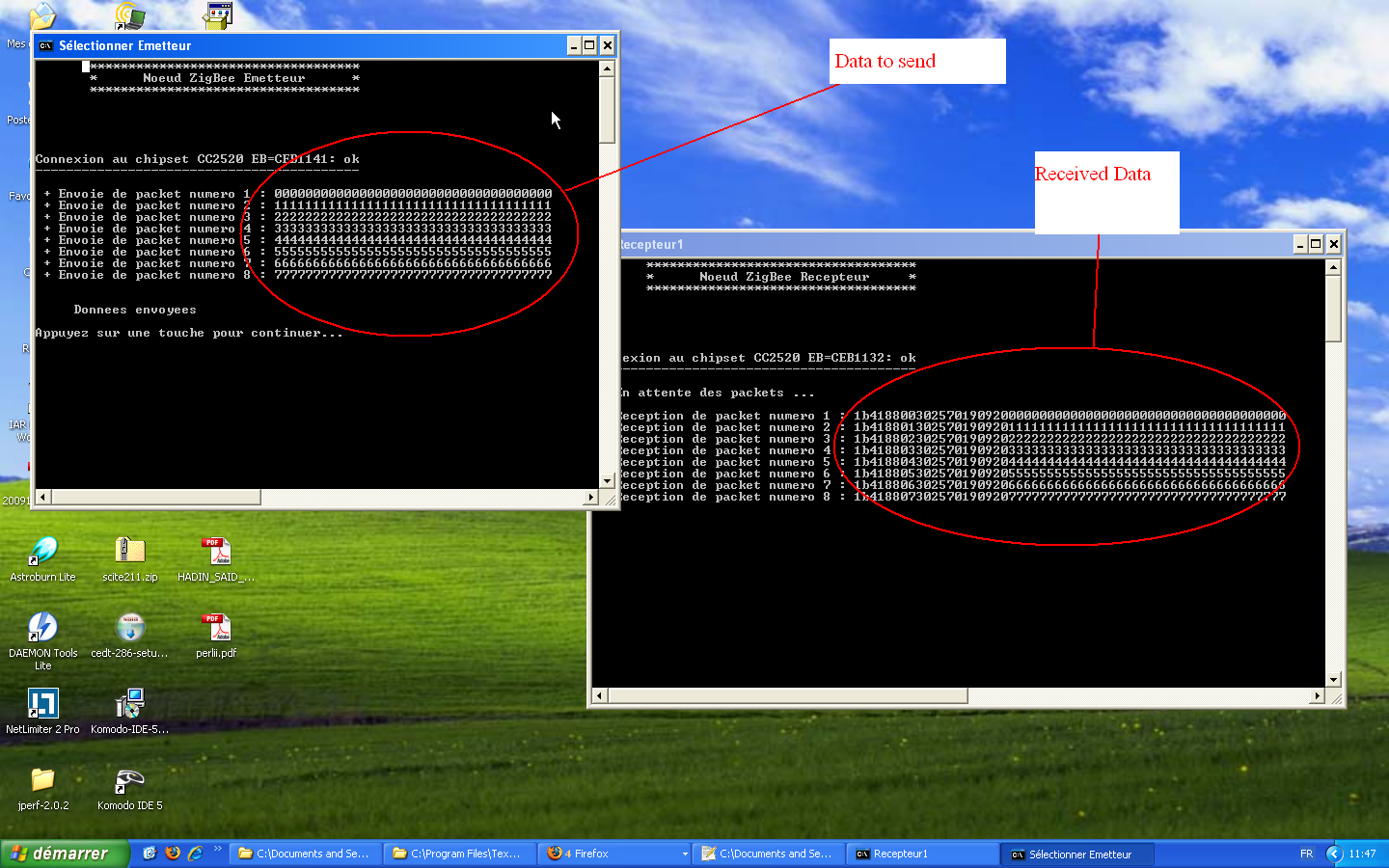
just installed the new version of SmartRF Studio (7), and I discovered some Perl scripts performing a simple communication between two ZigBee
kits.
I'd like to enjoy and develop an application arround this but I can't access to librairies like dal_ext ...
If anyone has an idea where I can find this?? or any help can be useful
Thank you

-
Ask a related question
What is a related question?A related question is a question created from another question. When the related question is created, it will be automatically linked to the original question.

{kind=link}