Other Parts Discussed in Thread: CC2530
Hello,
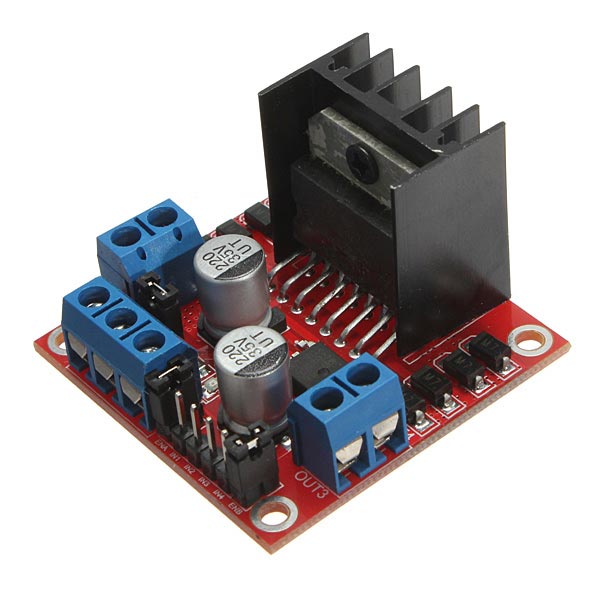
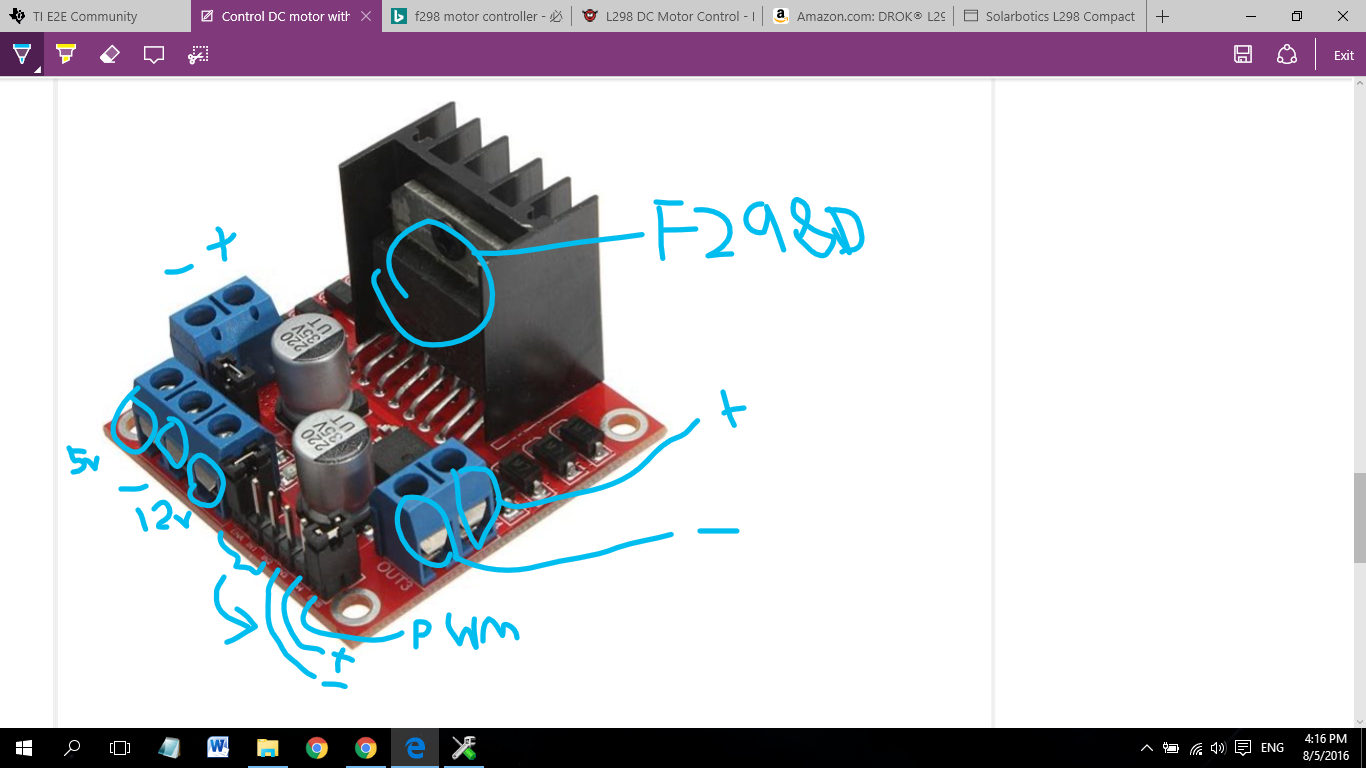
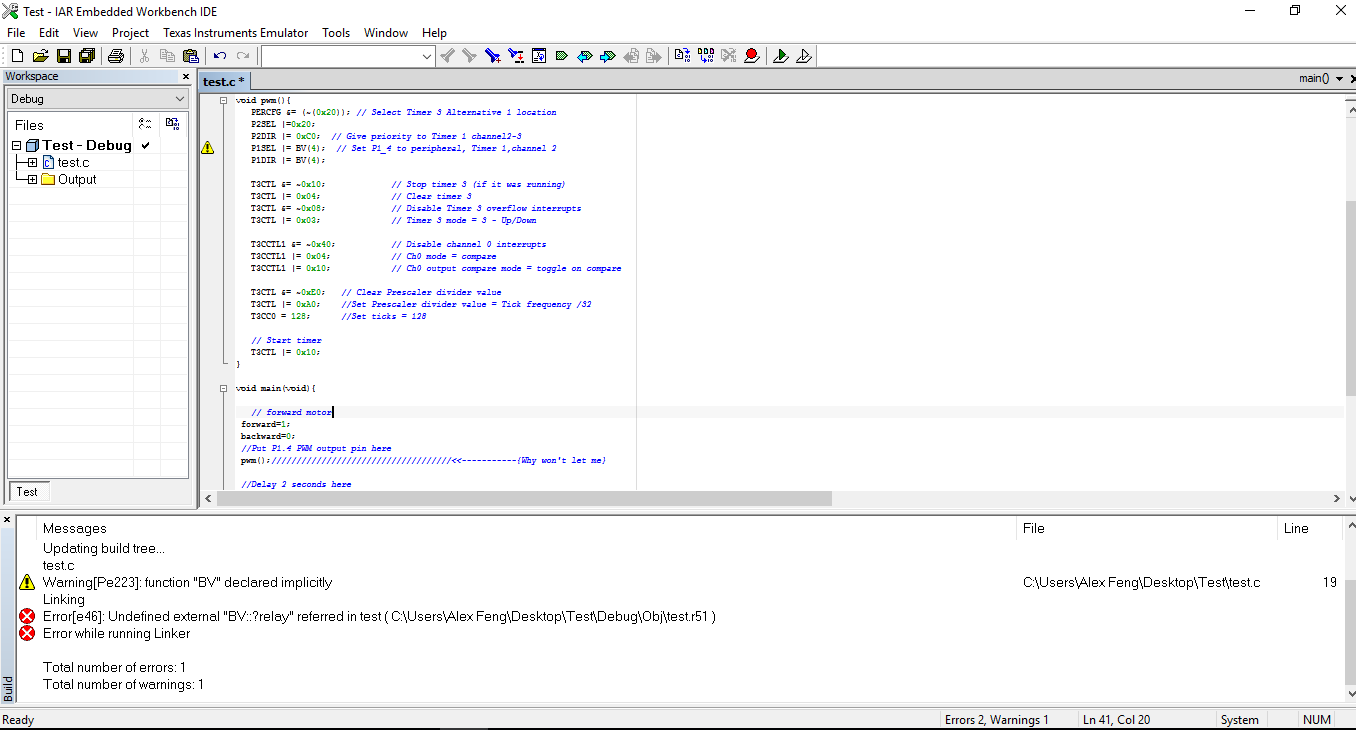
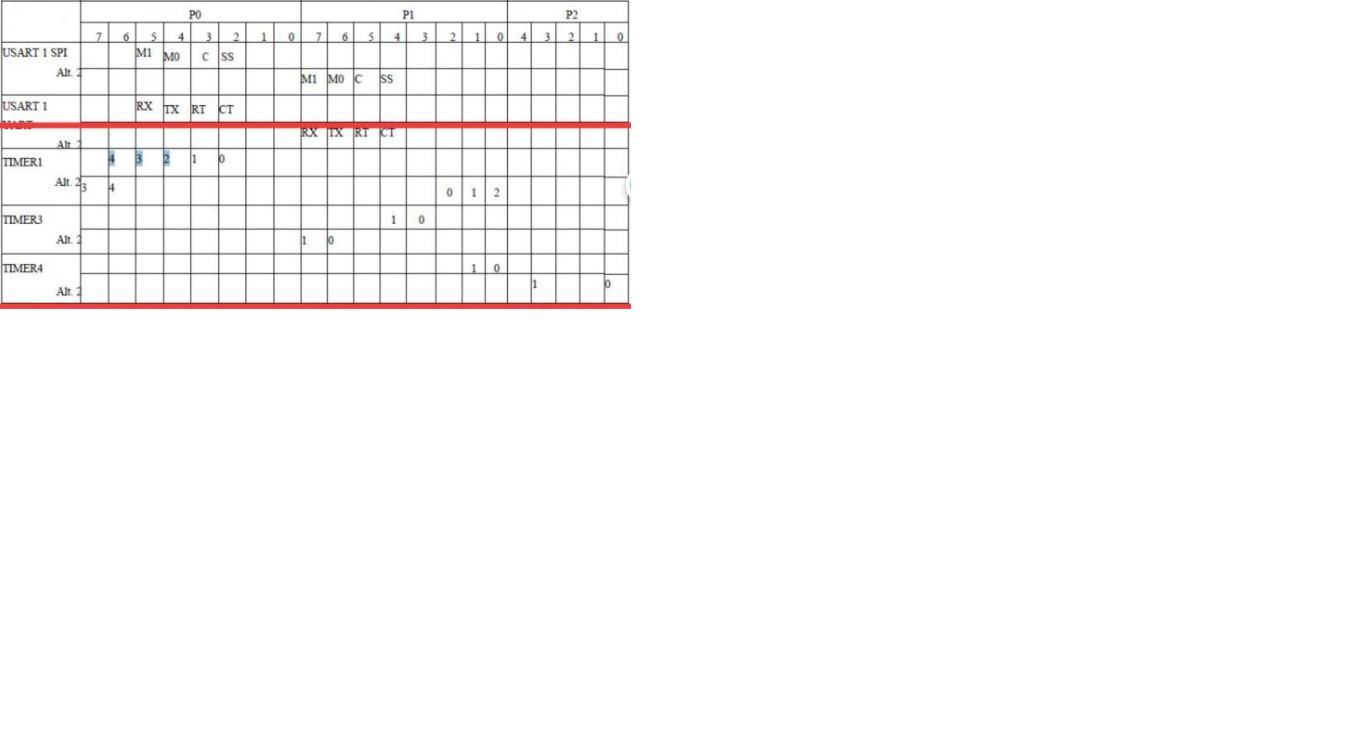
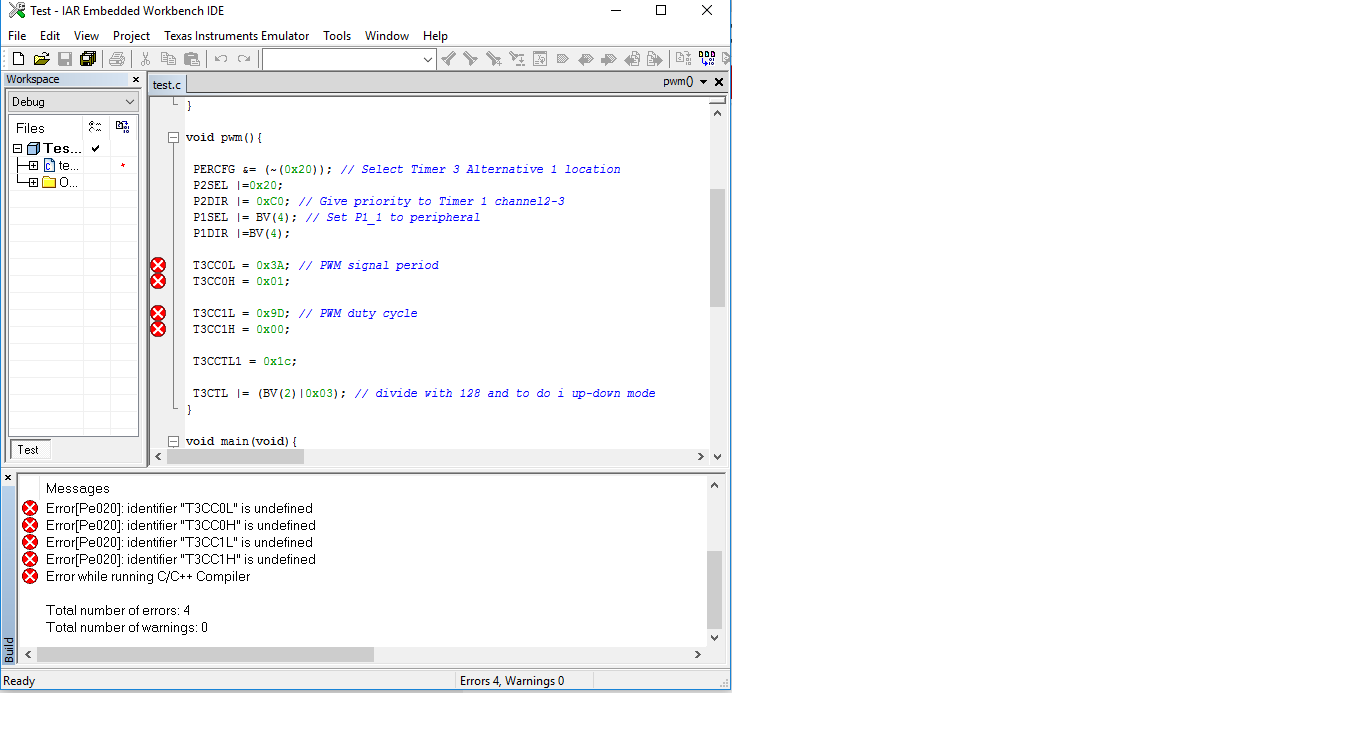
My question is how to program a ZigBee board using IAR 8051 workbench to control a DC motor to go both directions like how the automatic door lock works. The speed doesn't matter. I am seeking help from anyone as how to program a DC motor to go in 2 directions for a ZigBee module. I would appreciate any replies. Thank you.