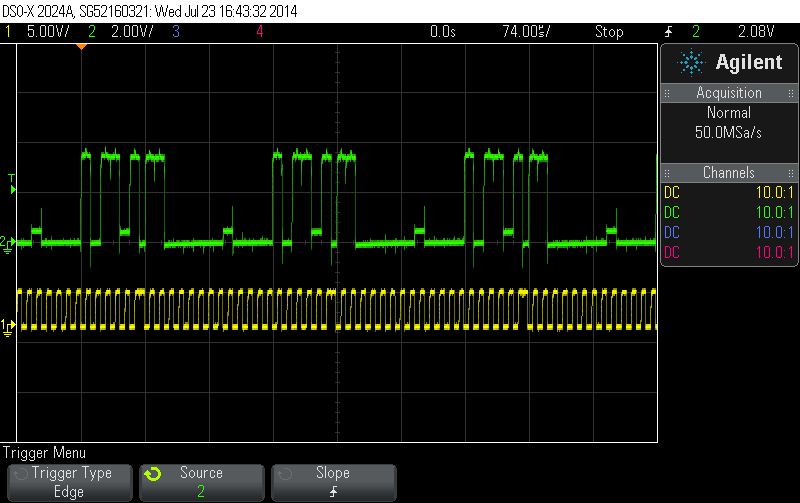
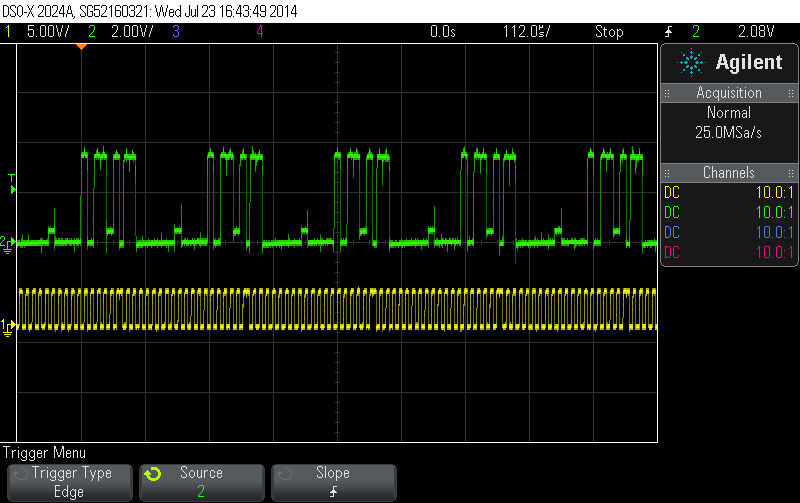
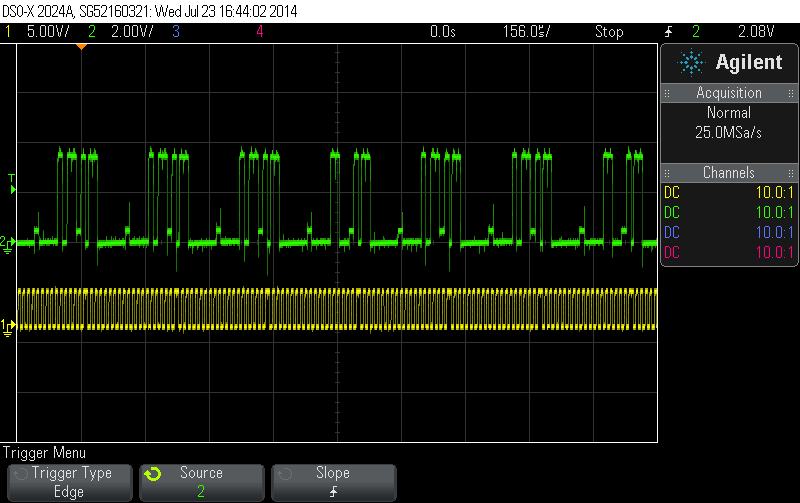
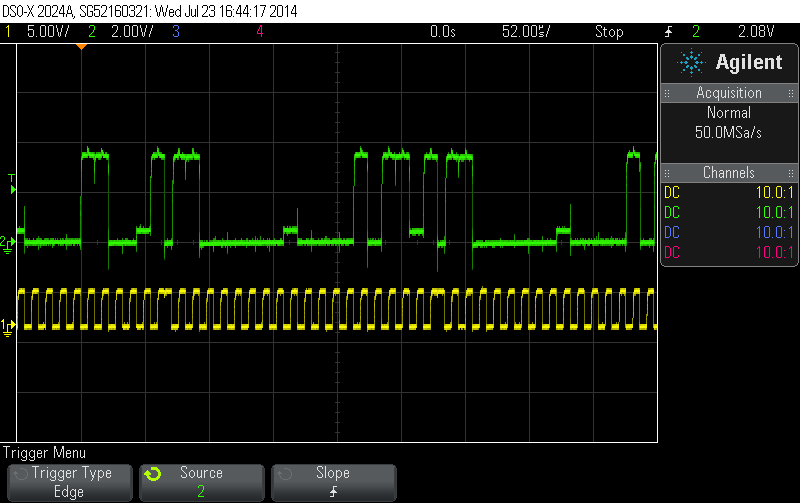
I have tried the sample code for the MSP430F5529 with teh change to have it working on B1 as opposed to B0. I have posted the code below in its charged form. The issue I am getting is there does not appear to be any intelligent output from the I2C module, I have included a logic capture below.
#include <msp430.h>
unsigned char *PTxData; // Pointer to TX data
unsigned char TXByteCtr;
const unsigned char TxData[] = // Table of data to transmit
{
0x11,
0x22,
0x33,
0x44,
0x55
};
int main(void)
{
unsigned int i;
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
P4SEL |= 0x06; // Assign I2C pins to USCI_B0
UCB1CTL1 |= UCSWRST; // Enable SW reset
UCB1CTL0 = UCMST + UCMODE_3 + UCSYNC; // I2C Master, synchronous mode
UCB1CTL1 = UCSSEL_2 + UCSWRST; // Use SMCLK, keep SW reset
UCB1BR0 = 12; // fSCL = SMCLK/12 = ~100kHz
UCB1BR1 = 0;
UCB1I2CSA = 0x48; // Slave Address is 048h
UCB1CTL1 &= ~UCSWRST; // Clear SW reset, resume operation
UCB1IE |= UCTXIE; // Enable TX interrupt
while (1)
{
for(i=0;i<10;i++); // Delay required between transaction
PTxData = (unsigned char *)TxData; // TX array start address
// Place breakpoint here to see each
// transmit operation.
TXByteCtr = sizeof TxData; // Load TX byte counter
UCB1CTL1 |= UCTR + UCTXSTT; // I2C TX, start condition
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0, enable interrupts
__no_operation(); // Remain in LPM0 until all data
// is TX'd
while (UCB1CTL1 & UCTXSTP); // Ensure stop condition got sent
}
}
//------------------------------------------------------------------------------
// The USCIAB0TX_ISR is structured such that it can be used to transmit any
// number of bytes by pre-loading TXByteCtr with the byte count. Also, TXData
// points to the next byte to transmit.
//------------------------------------------------------------------------------
#if defined(__TI_COMPILER_VERSION__) || defined(__IAR_SYSTEMS_ICC__)
#pragma vector = USCI_B1_VECTOR
__interrupt void USCI_B1_ISR(void)
#elif defined(__GNUC__)
void __attribute__ ((interrupt(USCI_B1_VECTOR))) USCI_B1_ISR (void)
#else
#error Compiler not supported!
#endif
{
switch(__even_in_range(UCB1IV,12))
{
case 0: break; // Vector 0: No interrupts
case 2: break; // Vector 2: ALIFG
case 4: break; // Vector 4: NACKIFG
case 6: break; // Vector 6: STTIFG
case 8: break; // Vector 8: STPIFG
case 10: break; // Vector 10: RXIFG
case 12: // Vector 12: TXIFG
if (TXByteCtr) // Check TX byte counter
{
UCB1TXBUF = 0x0C;//*PTxData++; // Load TX buffer
TXByteCtr--; // Decrement TX byte counter
}
else
{
UCB1CTL1 |= UCTXSTP; // I2C stop condition
UCB1IFG &= ~UCTXIFG; // Clear USCI_B0 TX int flag
__bic_SR_register_on_exit(LPM0_bits); // Exit LPM0
}
default: break;
}
}

I have also tried my own code which is below also which I can not get working. Any help would be much appreciated.
#include <msp430f5529.h>
int initI2C(){
P4SEL |= 0X60;
UCB1CTL1 = UCSWRST;
UCB1CTL0 = UCMST + UCMODE_3 +UCSYNC;
UCB1CTL1 = UCSSEL_2 + UCSWRST;
UCB1BR0 = 12; //fSCL = SMCLK/12 = ~100kHz
UCB1BR1 = 0;
}
int sendI2C(){
UCB1I2CSA = 0x60; //Set Slave Address
UCB1CTL1 &= ~UCSWRST; // Clear SW reset, resume operation
// UCB1IE |= UCTXIE; // Enable TX interrupt
UCB1CTL1 |= UCTR + UCTXSTT; // I2C TX, start condition
UCB1TXBUF = 0x0C
}
int main(){
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
initI2C();
sendI2C();
}
//------------------------------------------------------------------------------
// The USCIAB0TX_ISR is structured such that it can be used to transmit any
// number of bytes by pre-loading TXByteCtr with the byte count. Also, TXData
// points to the next byte to transmit.
//------------------------------------------------------------------------------
__interrupt void USCI_B1_ISR(void){
switch(__even_in_range(UCB1IV,12))
{
case 0: break; // Vector 0: No interrupts
case 2: break; // Vector 2: ALIFG
case 4: break; // Vector 4: NACKIFG
case 6: break; // Vector 6: STTIFG
case 8: break; // Vector 8: STPIFG
case 10: break; // Vector 10: RXIFG
case 12: // Vector 12: TXIFG
UCB1TXBUF = 0xC0; // Load TX buffer
UCB1CTL1 |= UCTXSTP; // I2C stop condition
UCB1IFG &= ~UCTXIFG; // Clear USCI_B0 TX int flag
__bic_SR_register_on_exit(LPM0_bits); // Exit LPM0
default: break;
}
}
Thanks