Other Parts Discussed in Thread: MIKROELEKTRONIKA, , SYSBIOS
Tool/software: Code Composer Studio
Hello i am new with the RTOS programming and i try finish up my project for university.
In the project we use a output module as a 7 segment. ( 2 digit ) from MIKROE - 1201 - 7seg Click - 2 digit - 5V, Mikroelektronika.
I made the SPI communication and the UART communication with the module.
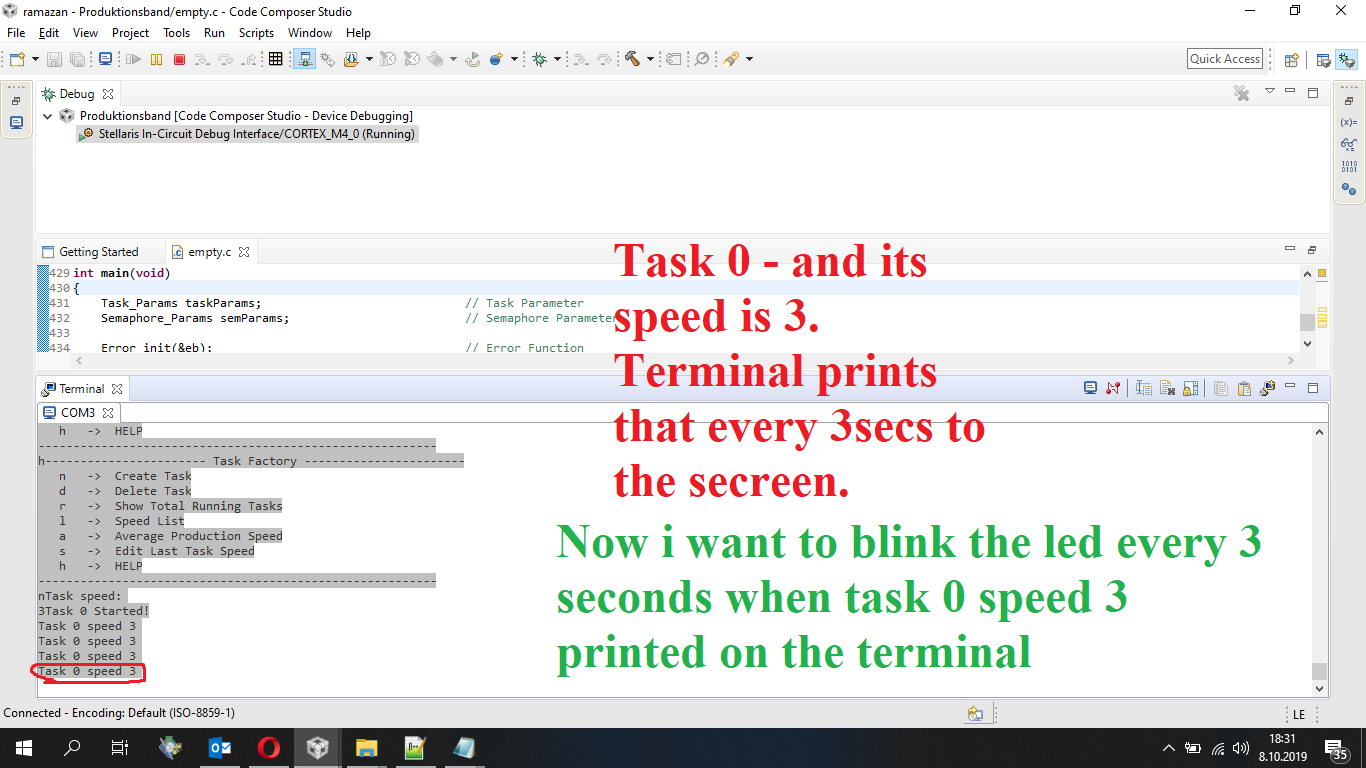
On the terminal i can create tasks with a certain speed and the created tast is printing on the terminal with a certain period of time which is set by user.
At the same time when we create a task on the 7 segment digit 1 display the task ID and the digit 2 display the speed of the task.
I want to add a function which start a blinking a led on the board Tiva C series EK-TM4C1294XL Evaluation Kit Connected launch pad.
Down below you can find the code that i prepared.
/************************************************************
* ============ empty_min.c - Produktion Line ============ *
* *
* Autor:
* Date: 07.10.2019 *
*************************************************************
**************************** Header Files ****************************/
#include <stdint.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <stdbool.h>
#include "inc/hw_ints.h"
#include "inc/hw_memmap.h"
#include "driverlib/debug.h"
#include "driverlib/gpio.h"
#include "driverlib/interrupt.h"
#include "driverlib/pin_map.h"
#include "driverlib/rom.h"
#include "driverlib/rom_map.h"
#include "driverlib/sysctl.h"
#include "driverlib/ssi.h"
#include <driverlib/uart.h> // Supplies UART
// driver library for SPI peripheral
uint32_t g_ui32SysClock; // system clock in Hz
uint8_t font[10] = {0x7E, 0x0A, 0xB6, 0x9E, 0xCA, 0xDC, 0xFC, 0x0E, 0xFE, 0xDE}; // 7-Segment font, letters 0 to 9
/* XDCtools Header files */
#include <xdc/std.h>
#include <xdc/runtime/System.h>
/* BIOS Header files */
#include <ti/sysbios/BIOS.h>
#include <ti/sysbios/knl/Task.h>
#include <xdc/runtime/Error.h>
#include <xdc/runtime/System.h>
/* TI-RTOS Header files */
#include <ti/drivers/GPIO.h>
#include <ti/drivers/SPI.h>
#include <ti/drivers/UART.h>
#include <ti/drivers/USBMSCHFatFs.h>
#include <ti/sysbios/knl/Semaphore.h>
//#include <ti/sysbios/knl/Mailbox.h>
/* Board Header file */
#include "Board.h"
#include "EK_TM4C1294XL.h"
/**************************** Compiler Commands ****************************/
#define TASKSTACKSIZE 512 // Max task size, see
#define MAX_TASKS 10 // max possible tasks
/**************************** Global variables & Structs ****************************/
Error_Block eb; // Error Block
/* UART0 Handle, Parameters and uart0 Semaphore */
UART_Handle uart0;
UART_Params uart0Params;
Semaphore_Struct sem_uart0_write_struct; // Semaphore save the uart0
Semaphore_Handle sem_uart0_write_handle;
/* Task Struct and Stacksize*/
Task_Struct task_Manager_Struct;
Char task_Manager_Stack[TASKSTACKSIZE];
Task_Struct taskStruct[MAX_TASKS];
Char taskStack[MAX_TASKS][TASKSTACKSIZE];
Task_Struct taskDisplayManagerStruct;
Char task_DisplayManager_Stack[TASKSTACKSIZE];
/* Global Variable */
bool show = 1;
int speed[MAX_TASKS]; // Task speed field
unsigned char buf[1]; // buffer for reading data from uart0
/**************************** Function definitions ****************************/
void itoc(int);
int ctoi(char);
/**************************** Tasks ****************************/
// Configuration of SPI (SSI3, on BoosterPack 2 connector, master mode, 9 Mbps)
void InitSpi(void) {
// enable peripherals
SysCtlPeripheralEnable(SYSCTL_PERIPH_SSI3); // enable SSI3 (for SPI)
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOQ); // enable port Q for SSI I/O-pins
// configure pins as SSI3 pins
GPIOPinConfigure(GPIO_PQ0_SSI3CLK); // Q0 for Clk
GPIOPinConfigure(GPIO_PQ3_SSI3XDAT1); // Q3 for Master Output Slave Input (MOSI)
GPIOPinConfigure(GPIO_PQ2_SSI3XDAT0); // Q2 for Master Input Slave Output (MISO)
// configure pins for SSI3
GPIOPinTypeSSI(GPIO_PORTQ_BASE, GPIO_PIN_3 | GPIO_PIN_2 | GPIO_PIN_0);
// configure SSI3 communication
// SSI base address (SSI3), SSI clk (120 MHz), data transfer protocol (Motorola Mode 0),
// mode of operation (Master), SPI clock rate (9 Mbps), bits per frame (8)
SSIConfigSetExpClk(SSI3_BASE, g_ui32SysClock, SSI_FRF_MOTO_MODE_0, SSI_MODE_MASTER, 9000000, 8);
SSIEnable(SSI3_BASE); // enable the SSI3 module
// Configure latch pin for 74HC595 (7seg click)
SysCtlPeripheralEnable(SYSCTL_PERIPH_GPIOP); // enable port Q
GPIOPinWrite(GPIO_PORTP_BASE, GPIO_PIN_5, GPIO_PIN_5); // set pin P5 to 1
GPIOPinTypeGPIOOutput(GPIO_PORTP_BASE, GPIO_PIN_5); // configure pin P5 for output
}
//****************************************************************************
//****************************************************************************
// send byte over SPI on BoosterPack 2 connector, latch byte to outputs of 74HC595 (7seg click) after sending
void SpiSend (uint8_t data) {
SSIDataPut(SSI3_BASE, data); // send byte over SPI
SysCtlDelay(100); // wait until byte was sent
GPIOPinWrite(GPIO_PORTP_BASE, GPIO_PIN_5, 0); // latch byte to outputs of 74HC595 (7seg click) with 0 on P5
GPIOPinWrite(GPIO_PORTP_BASE, GPIO_PIN_5, GPIO_PIN_5); // set P5 back to 1
// pulse width with no delay and optimization 2 is about 100 ns (measured), slow enough
}
void DisplayManager(UArg zehner, UArg einser)
{
SpiSend(font[einser]); // output next digit
SpiSend(font[zehner]);
//Task_sleep(10);
}
/**************************** Tasks ****************************/
/* Slave Task */
int Slave_Task(UArg ID)
{
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER); // Save uart0, if uart0 is used, wait forever
UART_write(uart0, "Task ", sizeof("Task ")); // write to uart0
itoc(ID); // itoc - int to char
UART_write(uart0, buf, 1);
UART_write(uart0, " Started!\r\n", sizeof(" Started!\r\n"));
Semaphore_post(sem_uart0_write_handle); // Free uart0
Task_sleep(speed[ID]); // Task sleep for speed time
while(1) // infinity loop
{
if(show) // show products in terminal if true
{
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_write(uart0, "Task ", sizeof("Task "));
itoc(ID);
UART_write(uart0, buf, 1);
UART_write(uart0, " speed ", sizeof(" speed "));
itoc(speed[ID]/1000);
UART_write(uart0, buf, 1);
UART_write(uart0, " \r\n", sizeof(" \r\n"));
Semaphore_post(sem_uart0_write_handle);
}
Task_sleep(speed[ID]);
}
}
/* Task Manager */
void Task_Manager(void) // Task Manager, control all Tasks and the Interface
{
Task_Params taskParams; // Task Parameter
Task_Params DisplayParams;
int i, ID = 0; // ID to identify the Task
char choice; // choice - for the command comming from uart0
int durchschnitt = 0; // Variables
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER); // Save uart0
UART_write(uart0, "\r\nCreate Task ...\r\n", sizeof("\r\nCreate Task ...\r\n")); // write uart0
Semaphore_post(sem_uart0_write_handle); // Free uart0
while(1)
{
UART_read(uart0, &choice, 1); // read from uart0 and save it to "choice"
switch(choice) // switch case
{
/* t - changing last task speed */
case 's':
if(ID==0) // if no Task, break
break;
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_write(uart0, "\r\nEdit last task speed: ", sizeof("\r\nEdit last task speed: "));
UART_read(uart0, &choice, 1);
if((int)(choice-48)<=0 || (int)(choice-48)>=9) // ASCII input -> integer output
{
UART_write(uart0, " invalid Speed, only 1 to 9 allowed.\r\n", sizeof(" iinvalid Speed, only 1 to 9 allowed.\r\n"));
break;
}
speed[ID-1] = (int)(choice-48)*1000; //ASCII -> int (48 == 0)
UART_write(uart0, "\r\n", sizeof("\r\n"));
Semaphore_post(sem_uart0_write_handle);
break;
/* n - create new Task */
case 'n':
if(ID>=10) // Max 10 Tasks (0-9)
break;
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_write(uart0, "Task speed: ", sizeof("Task speed: "));
UART_write(uart0, "\r\n", sizeof("\r\n"));
Semaphore_post(sem_uart0_write_handle);
UART_read(uart0, &choice, 1);
if((int)(choice-48)<=0 || (int)(choice-48)>=9)
{
UART_write(uart0, " invalid Speed, only 1 to 9 allowed.\r\n", sizeof(" invalid Speed, only 1 to 9 allowed.\r\n"));
break;
}
speed[ID] = (int)(choice-48)*1000; //ASCII -> int (48 == 0)
Task_Params_init(&taskParams);
taskParams.arg0 = ID;
Task_construct(&taskStruct[ID], (Task_FuncPtr)Slave_Task, &taskParams, NULL);
Task_Params_init(&DisplayParams);
DisplayParams.arg0 = ID;
DisplayParams.arg1 = ctoi(choice);
Task_construct(&taskDisplayManagerStruct, (Task_FuncPtr)DisplayManager, &DisplayParams, NULL);
ID++;
break;
/* d - delete Task */
case 'd':
if(ID<=0) // Max 10 Tasks (0-9)
break;
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_write(uart0, "\r\nDelete Task\r\n", sizeof("\r\nDelete Task\r\n"));
Semaphore_post(sem_uart0_write_handle);
ID--; // reset the Task ID
speed[ID] = BIOS_WAIT_FOREVER; // Task should wait forever
break;
/* a - avg. speed */
case 'a':
durchschnitt = 0;
for(i=0; i<10; i++)
{
durchschnitt += 10/(speed[i]/1000);
}
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_write(uart0, "Average \r\n", sizeof("Average \r\n"));
itoc((int)durchschnitt/10);
UART_write(uart0, buf, 1);
UART_write(uart0, " Product per Second\r\n", sizeof(" Product per Second\r\n"));
Semaphore_post(sem_uart0_write_handle);
durchschnitt = 0;
break;
/* l - show list with all Tasks */
case 'l':
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_write(uart0, "Task list: \r\n", sizeof("Task list: \r\n"));
UART_write(uart0, "Task: 0 1 2 3 4 5 6 7 8 9\r\n", sizeof("Task: 0 1 2 3 4 5 6 7 8 9\r\n"));
UART_write(uart0, "---------------------------\r\nSpeed: ", sizeof("---------------------------\r\nSpeed: "));
for(i=0; i<10; i++)
{
itoc(speed[i]/1000);
UART_write(uart0, buf, 4);
UART_write(uart0, " ", sizeof(" "));
}
UART_write(uart0, "\r\n", sizeof("\r\n"));
Semaphore_post(sem_uart0_write_handle);
break;
/* r - return how much tasks are running (producing) */
case 'r':
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_write(uart0, "Total Running Tasks: ", sizeof("Total Running Tasks: "));
itoc(ID);
UART_write(uart0, buf, 1);
UART_write(uart0, "\r\n", sizeof("\r\n"));
Semaphore_post(sem_uart0_write_handle);
DisplayParams.arg0 = 0;
DisplayParams.arg1 = ID;
Task_construct(&taskDisplayManagerStruct, (Task_FuncPtr)DisplayManager, &DisplayParams, NULL);
break;
/* h - Help list */
case 'h':
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_write(uart0, "----------------------- Task Factory -----------------------\r\n"
" n -> Create Task\r\n"
" d -> Delete Task\r\n"
" r -> Show Total Running Tasks\r\n"
" l -> Speed List\r\n"
" a -> Average Production Speed\r\n"
" s -> Edit Last Task Speed\r\n"
" h -> HELP\r\n"
"---------------------------------------------------------\r\n",
sizeof("----------------------- Task Factory -----------------------\r\n"
" n -> Create Task\r\n"
" d -> Delete Task\r\n"
" r -> Show Total Running Tasks\r\n"
" l -> Speed List\r\n"
" a -> Average Production Speed\r\n"
" s -> Edit Last Task Speed\r\n"
" h -> HELP\r\n"
"---------------------------------------------------------\r\n"));
Semaphore_post(sem_uart0_write_handle);
break;
/* default - no character math */
default:
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_write(uart0, "Invalid Command, Enter 'h' for HELP!\r\n", sizeof("Invalid Command, Enter 'h' for HELP!\r\n"));
Semaphore_post(sem_uart0_write_handle);
break;
}
}
}
/**************************** Functions ****************************/
/* itoc - Change a integer to a global char field (string)*/
void itoc(int z)
{
if(z==0)
buf[0]='0';
if(z==1)
buf[0]='1';
if(z==2)
buf[0]='2';
if(z==3)
buf[0]='3';
if(z==4)
buf[0]='4';
if(z==5)
buf[0]='5';
if(z==6)
buf[0]='6';
if(z==7)
buf[0]='7';
if(z==8)
buf[0]='8';
if(z==9)
buf[0]='9';
}
int ctoi(char c)
{
switch(c)
{
case '1':
return 1;
break;
case '2':
return 2;
break;
case '3':
return 3;
break;
case '4':
return 4;
break;
case '5':
return 5;
break;
case '6':
return 6;
break;
case '7':
return 7;
break;
case '8':
return 8;
break;
case '9':
return 9;
break;
}
}
/**************************** main ****************************/
int main(void)
{
Task_Params taskParams; // Task Parameter
Semaphore_Params semParams; // Semaphore Parameter
Error_init(&eb); // Error Function
/* Call board init functions */
Board_initGeneral();
Board_initGPIO();
Board_initUART();
// configure CPU clock to 120 MHz
g_ui32SysClock = SysCtlClockFreqSet(( SYSCTL_XTAL_25MHZ | SYSCTL_OSC_MAIN
| SYSCTL_USE_PLL | SYSCTL_CFG_VCO_480), 120000000);
InitSpi(); // SPI configuration
/* Create a UART for text reading/writing to the terminal */
UART_Params_init(&uart0Params);
uart0Params.writeDataMode = UART_DATA_TEXT;
uart0Params.readDataMode = UART_DATA_TEXT;
uart0Params.readReturnMode = UART_RETURN_FULL;
uart0Params.readEcho = UART_ECHO_ON;
uart0Params.baudRate = 115200;
uart0 = UART_open(Board_UART0, &uart0Params);
/* Construct a Semaphore object to be used as a resource lock for the uart0 port */
Semaphore_Params_init(&semParams);
Semaphore_construct(&sem_uart0_write_struct, 0, &semParams);
/* Obtain instance handle */
sem_uart0_write_handle = Semaphore_handle(&sem_uart0_write_struct);
Semaphore_post(sem_uart0_write_handle);
Semaphore_pend(sem_uart0_write_handle, BIOS_WAIT_FOREVER);
UART_writePolling(uart0, "\r\n\r\n ************************ Task Factory ************************\r\n", sizeof("\r\n\r\n ************************ Task Factory ************************\r\n"));
Semaphore_post(sem_uart0_write_handle);
/* Initialize & Construct Task_Manager */
Task_Params_init(&taskParams);
taskParams.stackSize = TASKSTACKSIZE;
taskParams.stack = &task_Manager_Stack;
Task_construct(&task_Manager_Struct, (Task_FuncPtr)Task_Manager, &taskParams, NULL);
/* Turn on user LED */
//GPIO_write(Board_LED0, Board_LED_ON);
/* Start BIOS */
BIOS_start();
return (0);
}
Now i know that the heartbeat function can be defined as a
Void heartBeatFxn1(UArg arg0, UArg arg1)
{
while (1) {
Task_sleep((unsigned int)arg0);
GPIO_toggle(Board_LED0);
}
}
Task_Struct task0Struct;
Task_Struct task1Struct;
Char task0Stack[TASKSTACKSIZE];
Char task1Stack[TASKSTACKSIZE];
/* Construct heartBeat Task thread */
Task_Params_init(&taskParams);
taskParams.arg0 = 500;
taskParams.stackSize = TASKSTACKSIZE;
taskParams.stack = &task0Stack;
Task_construct(&task0Struct, (Task_FuncPtr)heartBeatFxn, &taskParams, NULL);
How i can implement these function to my own code and work with the same time.
Can you please help me out with the suggesitons.