

從精細的手術過程,到在製造工廠舉起千斤重的物品,在各種方面,機器人無疑都讓我們的生活更加便利。在現代世界中,機器人帶來的影響有目共睹,但您曾好奇過機器人系統是如何達成如此驚人的精確度,又是如何做出迅速而強力的動作嗎?如果您的答案是馬達,那麼恭喜您答對了!
機器人通常是模仿人類的動作,因此會透過位移或旋轉以調整位置及方向,而這類動作基本上正是仰賴馬達的運作。
大部分的傳統應用實例,以機械手臂操作、輸送帶循環等機械制動應用最為常見。現代案例則可能相當單純,如旋轉攝影機方向,或精準控制機械波束轉向光達感測器。您可能會感到驚訝,風扇和幫浦等馬達的基礎應用,竟是散熱和液壓的大功臣。
影片:瞭解 TI 如何利用創新半導體強化機器人能力
例如,機械手臂關節的無刷 DC (BLDC) 馬達 (如圖 1 所示) 通常包含一個轉子與定子,分別進行旋轉與保持靜止。藉由將電子訊號傳遞至定子上的線圈繞組,產生磁場與磁力,可進一步讓轉子轉動,旋轉機械手臂的關節。此外,只要好好活用電子訊號,機械手臂不光能移動,甚至還可依照指定速度,執行精準的位置和扭矩動作要求。
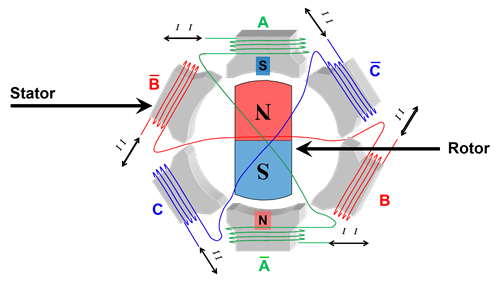
圖 1:BLDC 馬達構造剖面圖
馬達如何驅動新一代機器人
除了以動作為主,講求精確度與力量的任務,馬達控制半導體技術也持續進步,推出微處理器 (MCU) 和整合式馬達驅動器等裝置,改良機器人的活動方式。以下列舉四個機器人改良的特殊挑戰,就讓我們一探究竟。
挑戰 1:為實現人機協作,日益增加的安全要求
在傳統安全考量中,嚴格分離人類與機器人至關重要,最常見的方式就是將機器人關在護架中。隨著自動化作業越來越需要協作與互動,開始導入可提高生產量的協作機器人,但馬達必須具有安全停止模式、安全速度,以及扭矩和動作控制功能。
在滿足安全要求方面,C2000 32 位元 TMS320F28P650DK 無線微控制器等裝置扮演了相當重要的角色。這些裝置已通過功能安全認證,並整合可進行診斷的安全性周邊設備,能簡化設計,符合國際標準化組織 (ISO) 10218 規範。至於在光譜的類比端,DRV8353F 等智慧閘極驅動器可協助工程師利用 TÜV SÜD 認證的技術報告,實現安全目標。這類支援文件能引導工程師執行設計步驟,根據 IEC 61800-5-2 實施安全扭矩關閉。無論是無線微控制器或閘極驅動器,藉由特定元件,安全馬達系統的設計過程將更加輕鬆簡單。
32 位元 TMS320F28P650DK 無線微控制器等裝置扮演了相當重要的角色。這些裝置已通過功能安全認證,並整合可進行診斷的安全性周邊設備,能簡化設計,符合國際標準化組織 (ISO) 10218 規範。至於在光譜的類比端,DRV8353F 等智慧閘極驅動器可協助工程師利用 TÜV SÜD 認證的技術報告,實現安全目標。這類支援文件能引導工程師執行設計步驟,根據 IEC 61800-5-2 實施安全扭矩關閉。無論是無線微控制器或閘極驅動器,藉由特定元件,安全馬達系統的設計過程將更加輕鬆簡單。
挑戰 2:透過分散式馬達架構,減少重量、佈線和成本
馬達的電子元件正逐漸縮小,從控制機櫃,到能直接整合至機器人關節,一步步減少重量、佈線和系統成本。這波輕量化趨勢促使元件製造商開發解決方案,目標將更多的功能濃縮進更小的整合式電路套件。在空間限制之下,勢必需要更高的功率密度與電源效率。
LMG3422R050 等氮化鎵場效應電晶體已整合閘極驅動器,可將功率級效率提升至超過 99%,降低甚至消除整合式馬達對散熱器的依賴。使用 TMS320F28065 等無線微控制器的系統則可產生皮秒級的脈寬調變訊號,並擁有即時通訊週邊裝置和絕對式編碼器介面。透過這些功能,原本每具馬達需要 10 條纜線,到現在只要一組雙線匯流排,即可支援整部機械手臂。只要在配置中採用無線微控制器和氮化鎵場效應電晶體,便能透過 DP83TG721 等乙太網路實體層收發器新增單對乙太網路功能,協助設計者最佳化有線連線能力。
挑戰 3:打造更高的精密度與準確度,自動執行精確動作任務
產品小型化的趨勢影響了許多應用的馬達選擇 (伺服馬達、步進馬達、BLDC),而為了讓小型產品能在互動中執行精確動作,馬達控制和位置回饋也變得更加複雜。針對滿足小型化所帶來的高精確度需求,半導體創新正是理想選擇。例如,AMC3306 等電流感測器具有 ±50-µV 偏移,並包含一個整合式電源供應器。藉由將這些功能整合入單一套件,不只能提升控制迴路的準確度,也能縮小整體印刷電路板的尺寸。
挑戰 4:最佳化電源效率,協助電池供電行動應用
機器人可不一定是固定不動,現在越來越多機器人應用改採行動部署,協助自動配送包裹,或安全地探索地形。現有與未來的半導體在用於感測、處理和即時控制應用時,必須能在高效能與電源效率間取得平衡,確保足夠的電池續航力與可運作範圍。
其實,打造理想電源效率比想像中簡單,也不需要使用大量分離式元件打造複雜設計。例如 MCT8316A 等單一馬達控制器,即可透過減少機器人的耗能元件,協助小型幫浦和風扇馬達有效運作。此高度整合的產品包含六個金屬氧化半導體場效電晶體,可打造半橋功率級以供應馬達電流,同時具有一個數位核心,不必編寫程式碼,即可執行簡單的梯形馬達控制。
馬達控制的下一步是什麼?
想必在未來,機器人能輕鬆完成現今看似不可能的任務,例如在最深的海溝或未知宇宙中進行大量運算,讓人大為驚嘆。如同目前採用光達和超音波技術的應用,新設計可能會納入更進階的感測器。從過去的有線機器人,到搭載更多軟體導向解決方案的現代應用,就連我們與機器人溝通的方式都有可能改變。更強大的可及性讓我們能透過語音、視覺表達,甚至想法本身,更直接而準確地控制機器人。隨著機器人技術與應用持續進化,作為核心的馬達自然也須與時俱進,推動機器人科技發展。