Hello
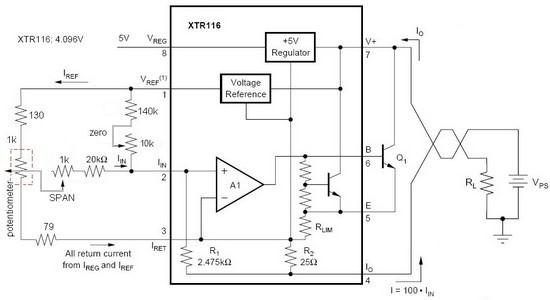
I have a problem with linearity chip XTR116, my circuit is connected according to FIGURE 1. Nonlinearity chip is 0.003%, potentiometer have nonlinearity under 0.1%. I need all nonlinearity under 0.1%, but when I measure this circuit, nonlinearity is bethween 0.3 to 0.4%. You know, what could be a problem ?
Thanks for help
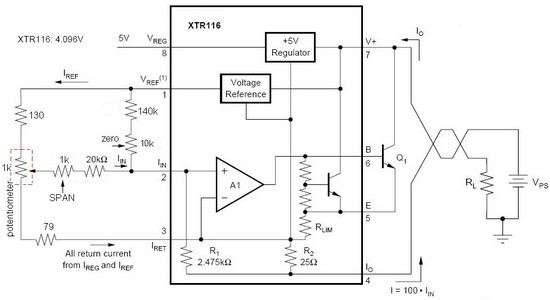
Figure .1
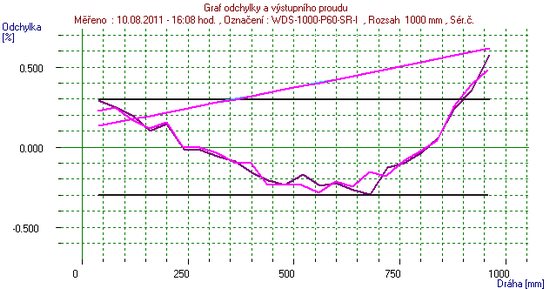
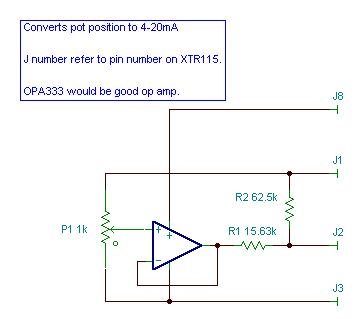
Figure.2