Part Number: INA250
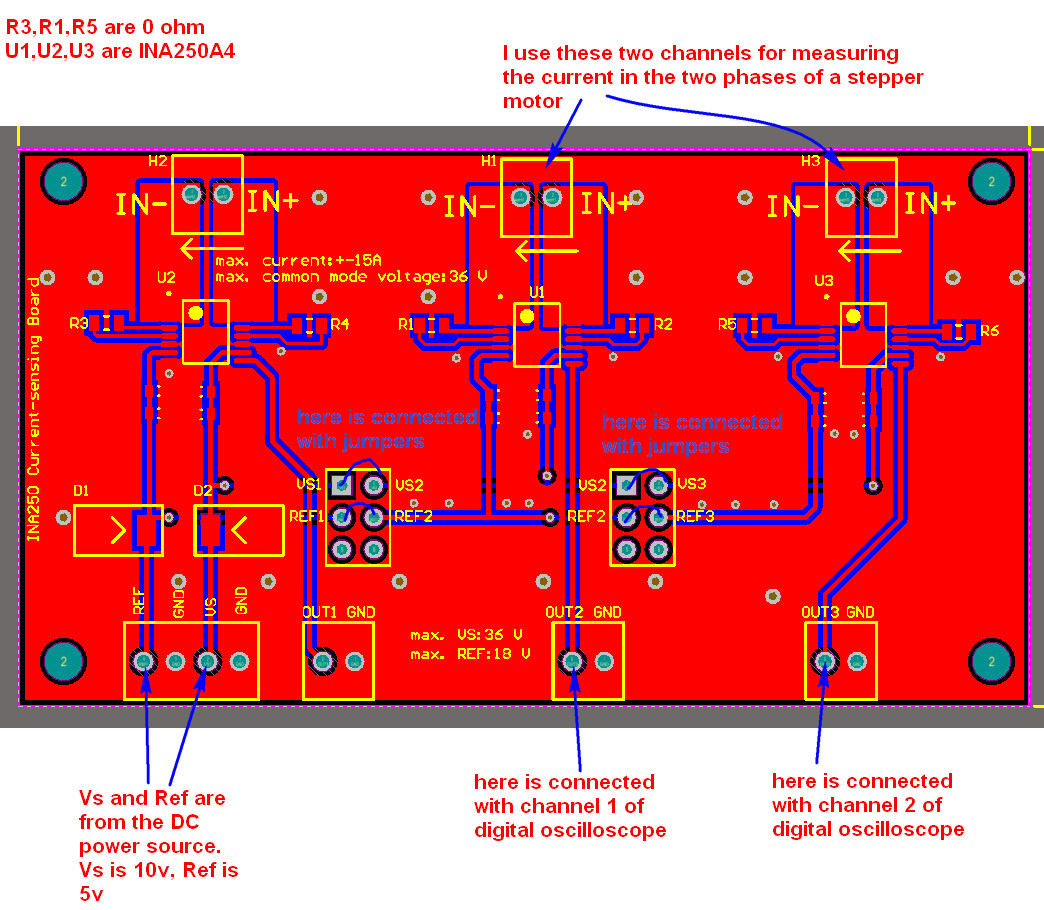
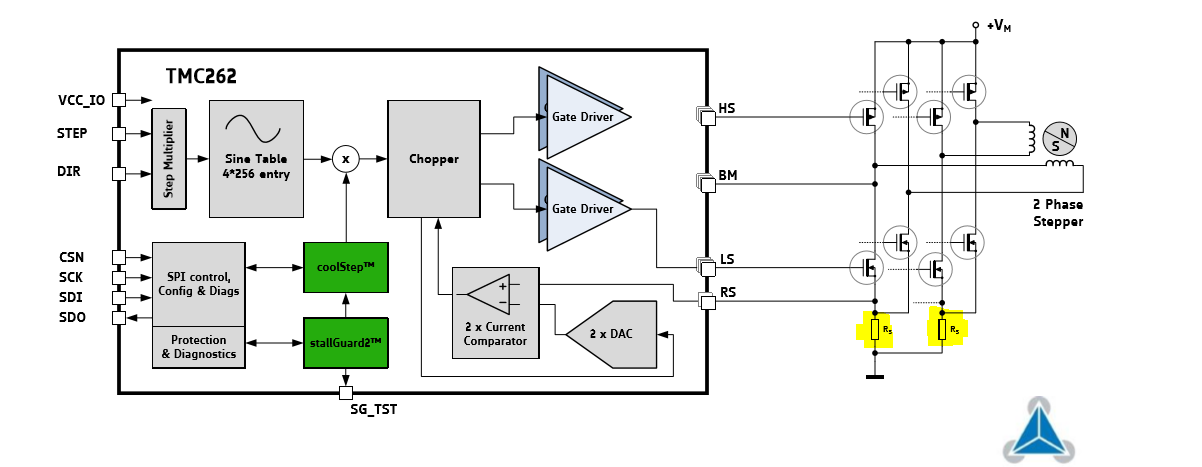
I use this board to measure the current in the two phases of stepper motor, using the right two channels. I call these two channels, H1, H3, respectively.
If I only use H1 channel, the measurement is ok. If I only use H3 channel, the measurement is also ok. When I use these two channels simultaneously, the INA250A4 chips in H1 and H3 channels will be damaged.
Please help me find where the problem is in my design. And the schematic file and Altium Designer PCB project can downloaded from  .
.
Thank you.