Other Parts Discussed in Thread: INA240, INA138, INA216, INA270, INA193, INA203, INA200, INA226, INA170, LMP8645, INA223, INA282, INA210, INA199-Q1, INA180, INA181, INA121
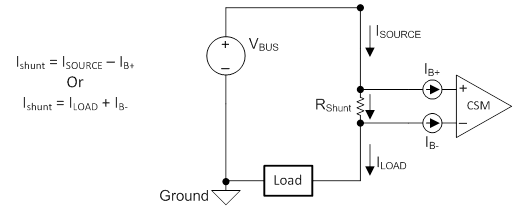
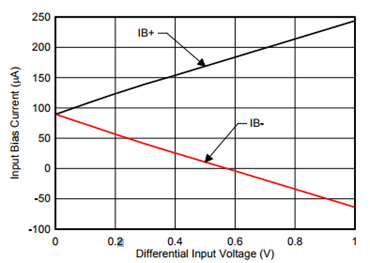
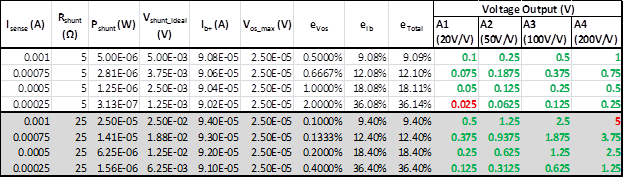
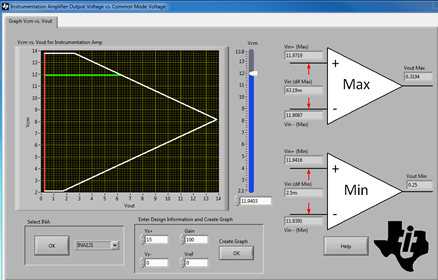
What are the design considerations when making small current measurements? How do we analyze this error especially for offset and bias currents of the current sense amplifier?