


Other Parts Discussed in Thread: ADS1285
Tool/software:
Hello,
I have some questions about the calibration procedure shown below.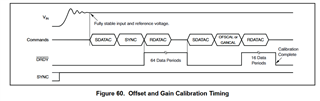
I want to further understand each command and their role.
1) Why is SDATAC first sent if it is followed later by a RDATAC? Is it because SDATAC must be sent before any other command (SYNC or R/W reg or others)?
2) Why is the SYNC signal needed?
3) I understand that the RDATAC and 64 data period is to allow proper settling of the FIR filter. Is that correct?
4) Why is SDATAC needed again? Is it because OFSCAL/GANCAL must be sent only when we are not in read continuous?
5) Do we need to do OFSCAL before GANCAL or is the order unimportant? I assume offset removal is important for the gain calculation, but I couldn't find confirmation for this.
I would have expected this simpler sequence to work:
1) Wait for settling of reference voltage and input voltage
2) Send the OFSCAL/GANCAL command
3) Wait 16 drdy cycles
I have another question about SDATAC:
1) Is it necessary to go in SDATAC mode for any command, whether is it read or write? I expected it to be needed only for read command because of the sharing of the dout signal, but the further I read, the more I understand that any spi command needs to be done in SDATAC mode.
Thank you,
Vincent

